

Пример как да използваме блокче за проверка "ако"
Ако за първи път чувате за блокче за проверка, изгледайте следното видео.
- #1604
- 30 Mar 2020

How to Connect Your Computer to the SPIKE Prime Hub
After downloading the SPIKE programming software, you’ll need to connect to your hub in order to load a program to your robot. Let’s take a look at how you can do that!
- #1605
- 21 Jul 2020


FLL 2020: How to accomplish Tire Flip mission
This video tutorial is for the Tire Flip Mission from FIRST LEGO League 2020 RePlay robotics competition. Flip missions are always some of the most interesting and challenging. In this tutorial you would learn how to build an attachment and accomplish a mission that requires you to flip a part, like flipping a coin. Most of the complexity for this mission is in the attachment and not the programming, but this is also way it works perfectly, every single time.
- #1757
- 31 Jul 2021

FLL 2020: How to accomplish the Rowing Machine mission
This video tutorial is about how to accomplish the Rowing Machine mission in the FIRST LEGO League 2021 RePlay robotics competition. The Rowing machine mission model consists of a wheel that should be pushed or pulled and will lift two other wheels, just like a real Rowing Machine. What you will get from this tutorial is an example of how to build a robot that is very precise. The attachment is simple, but the programming is more difficult. You must first align to a line, and then to a wall and then make a precise turn with the robot to accomplish the mission with our attachment.
- #1763
- 01 Aug 2021

How to move forward with LEGO MINDSTORMS Robot Inventor
With this video tutorial we start the course for LEGO MINDSTORMS Robot Inventor and how to successfully program the robot for FIRST LEGO League robotics competition. It is good to have SPIKE Prime or EV3 for the competition. But if you happen to have Robot Inventor, don't be discourage. It is still possible to participate and accomplish a lot with the set.
- #1864
- 21 Mar 2022

How and why to align to a line with two LEGO MINDSTORMS Robot Inventor Color Sensors
In this video tutorial we discuss probably the most useful principle that we've found for FIRST LEGO League competitions and this is how to align to a line with two color sensors. We use the LEGO Mindstorms Robot Inventor for a quick demonstration of the principle. In the LEGO Mindstorms Robot Inventor Programming course we enter into more details of how exactly we program the sensors. The current tutorial demonstrates the use of such a program and makes clear why this could be very useful and is a must for any well prepared team and wants to achieve a good score on the competition.
- #1869
- 24 Mar 2022

Light sensors cover on LEGO Mindstorms Robot Inventor robots
In this video tutorial we demonstrate the importance of properly shielding and protecting the light/color sensors of your LEGO Mindstorms Robot Inventor robots. These principles generally apply for all kind of robots. The problem is that external light sources from the venue could change the behavior of the robot - like have you ever been to a competition venue where the lighting just makes the robot behave in different ways? - well this tutorial is for you!
- #1870
- 04 Apr 2022

Animation of an 'Inertia triggered attachment' from LEGO MINDSTORMS Robot Inventor
This short animation demonstrates a really useful principle for FIRST LEGO League competition and this is how to use the Inertia of the robot to trigger an attachment that will do the work for us. It is very useful as we don't have to use the motors of the robot and we can afford to use the motors for other things.
- #1871
- 07 Apr 2022

Robot Accuracy when moving fast VS moving slow on an FLL competition field with LEGO Education SPIKE Prime
In this tutorial we demonstrate how accurate the robot is when we are moving it slow vs when moving it fast. The point of the tutorial is to show that moving slowly is generally much more accurate. It is not accurate enough for a FIRST LEGO League competition, but if you have to move without the use of the sensors you can at least move slow.
- #1900
- 11 May 2022

Improve accuracy of LEGO Education SPIKE Prime with blocks to accelerate and decelerate
One of the easiest ways to improve the accuracy of LEGO Education SPIKE Prime robots is to use acceleration and deceleration when moving. This also applies to LEGO Mindstorms EV3 and LEGO Mindstorms Robot Inventor and generally to most robots that we know of. This tutorial demonstrates how acceleration and deceleration could be used and what improvement in accuracy and consistency you could expect. This is quite useful for FIRST LEGO League and other robotics competitions.
- #1912
- 23 Jun 2022
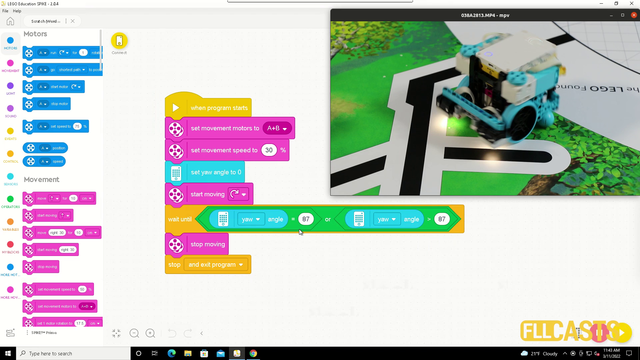
How to use Motion Sensor to turn accurately with LEGO Education SPIKE Prime
In this video tutorial we demonstrate the use of the motion sensor and how it could be use to turn precisely to 90 degrees. We demonstrate some of the caveats of the sensor and how sometimes it does not work as expected. Like you set the robot to turn until the sensors detects 90 degrees and at the end the robot is not at exactly 90 degrees.
- #1922
- 15 May 2022

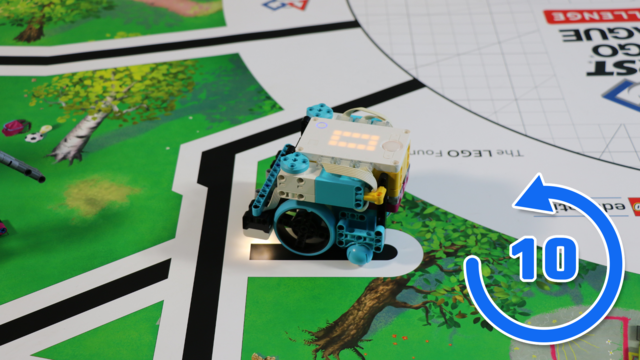
10 runs on accurately reaching a mission model with basic use of Motion Sensor from LEGO Education SPIKE Prime
In this video tutorial we will reach a specific location on the field 10 times. This programs demonstrates the accuracy and consistency of a program that used the Motion Sensor to detect the angle at which the robot rotates. At the end of the tutorial you will have a visual and clear picture of what you could expect from this basic usage in terms of consistency and accuracy. This might be enough for some cases and it might not be enough for others.
- #1924
- 26 May 2022
10 runs on turning fast and using Motion Sensor from LEGO Education SPIKE Prime
This LEGO Education SPIKE Prime video tutorial demonstrates the difference in turning slow and turning fast and using the Motion sensor to understand the orientation of the robot. We do 10 consecutive runs. The goal is to understand what can you expect from the robot behavior in terms of consistency.
- #1926
- 02 Jun 2022
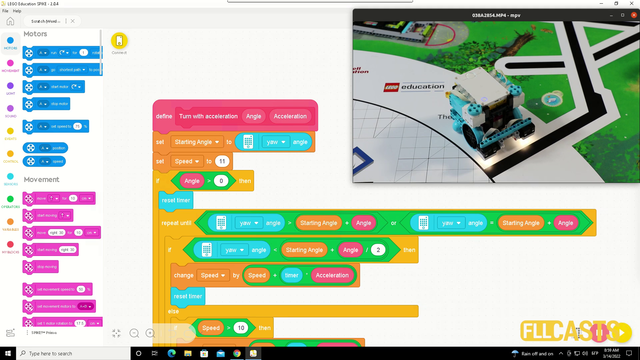
How to precisely turn with acceleration and Motion Sensor from LEGO Education SPIKE Prime
In this video tutorial we explore acceleration and deceleration and how to make the robot turn precisely by using acceleration and deceleration. The goal is for us to demonstrate a program that turns the robot to 90 degree. In the first 45 the robot is accelerating and in the second 45 it is decelerating.
- #1927
- 06 Jun 2022