Video tutorials -
Filters:


Как да използваме блокчето за случайно избиране в LEGO SPIKE Prime Word Blocks софтуер
Понякога не ни трябва робота да прави еднакви и предвидими неща, а нещо случайно и неочаквано! Ето как да направим това!
- #2047
- 01 Aug 2022

How to arrive at a specific position on the FLL field with LEGO Education SPIKE Prime
This is one of the last tutorials in the LEGO Education SPIKE Prime programming for Competitions course and it demonstrates what we've all been waiting for - how to reach a mission model from base in a reliable and consistent way when the mission model is on the other end of the field. Naturally what we use are all the different concepts that we've learned in the course and the tutorial is more advanced than the other so if anything is not clear take a look also at the different tutorials an concepts in the course.
- #1918
- 21 Jul 2022

10 runs backward align to a line with two Color Sensors from LEGO Education SPIKE Prime
When aligning backward the robot is still very consistent. It does not matter the direction in which we align. What you will learn from this tutorial is what is the consistency and reliability of the robot that you could expect.
- #1942
- 20 Jul 2022

How to backward align to a line with two Color Sensors from LEGO Education SPIKE Prime
Instead of aligning forward as in the previous tutorial we felt there is a need to demonstrate how we could align backward when moving with the robot. This is not a rare case. The attachments of the robot are generally at the front of the robot and especially during FIRST LEGO League competitions the robot must move backward very often. It is helpful to have in your toolbox the ability to align backward with the robot.
- #1941
- 20 Jul 2022

10 runs on forward align to a line with two Color Sensors from LEGO Education SPIKE Prime
This video tutorial demonstrates again the consistency of the program for aligning to a line. We run it ten time. We the robot is always coming from the left it is always arriving at the same position. When it is coming from the right it is always arriving at the same position.
- #1940
- 20 Jul 2022

How to forward align to a line with two Color Sensors from LEGO Education SPIKE Prime
The reason why you would want to watch this tutorial is because it demonstrates one of the most reliable ways to know where you are on the field and to accomplish missions successfully and this is aligning to a line. In the tutorial you will also see how a parallel program is developed and who parallel programs could be used in a meaningful way.
- #1939
- 20 Jul 2022

10 runs on advanced algorithm for smooth line follow with Color Sensor from LEGO Education SPIKE Prime
In this video tutorial we run the robot for 10 times and we demonstrate the consistency of the robot behavior with our advanced algorithm for smooth line following. What you will get from it is an understanding and demonstration of what can you expect from the robot.
- #1938
- 20 Jul 2022
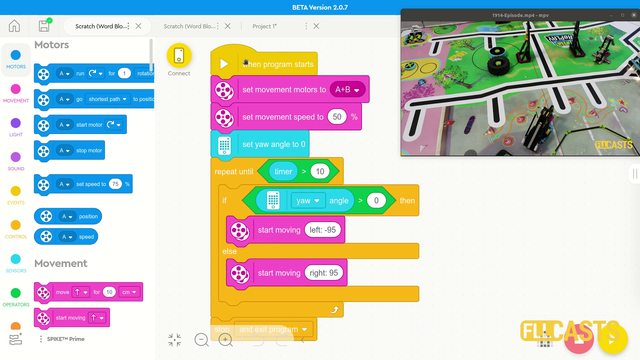
How to use Motion Sensor to accurately move forward with LEGO Education SPIKE Prime
This is the first video tutorial from the LEGO Education SPIKE Prime programming course in which we use a sensor, and we've selected to use the motion sensor. The Motion sensor allows us to detect how the robot turns in a 3-dimensional space-time continuum, or, to put it simply, we use it to move straight with the robot. That's it. We want to move straight - we use a sensor, and the Motion Sensor is a good choice.
- #1914
- 19 Jul 2022

10 runs on improve accuracy by accelerating with LEGO Education SPIKE Prime
In this 10 out of 10 tutorial we demonstrate the accuracy of the robot when we use acceleration in its movements. The robot has not sensors attached to it and it is not making use of it's internal sensors. The goal of the tutorial is to give you the understanding and to make a demonstration of how difficult it is to consistently reach a mission model without the use of sensor even when we use acceleration.
- #1913
- 19 Jul 2022

Как да използваме блокчето за безкрайно движение в LEGO SPIKE Prime Word Blocks софтуер
Едно от важните блокчета за правене на автономен робот е блокчето за безкрайно движение. В комбинация с други блокчета, то ни позволява много голям контрол върху движението на робота. Ето как работи това блокче!
- #2040
- 01 Jul 2022

Как да използваме блокчето за чакане на секунди в LEGO SPIKE Prime Word Blocks софтуер
Понякога ни е полезно робота да изчака преди да тръгне за да можем да се отдръпнем и да не му пречим или дори да пуснем камера, за да го снимаме. Ето как можем да програмираме това!
- #2039
- 01 Jul 2022

Как да използваме блокчето за събитие на сензора за сила в LEGO SPIKE Prime Word Blocks софтуер
Ето един от начините да програмираме със сензор за сила!
- #2034
- 01 Jul 2022

Какво е сензор за сила LEGO SPIKE Prime
С какво вие усещате света? А как роботът може да го направи? Ето първият начин!
- #2033
- 01 Jul 2022

Как да използваме блокче за пускане на звук до край в SPIKE Prime Word Blocks софтуер
Вече научихме как се използва блокчето за пускане на звук в този урок, сега да видим как да накараме звука да се пуска до край!
- #2030
- 01 Jul 2022

Как да използваме блокчето за пускане на дисплея на контролера за време в SPIKE Prime Word Blocks софтуер
Вече научихме как да ползваме блокчето за пускане на дисплея на контролера в този урок. Сега ще разберем как да направим това за време!
- #2029
- 01 Jul 2022

Как да използваме блокче за пускане на звук в SPIKE Prime Word Blocks софтуер
Чрез софтуера на SPIKE Prime можем да пускаме най-различни звуци! Ето как да го направим.
- #2028
- 01 Jul 2022

Как да използваме блокчето за пускане на дисплея на контролера в SPIKE Prime Word Blocks софтуер
Ето как можем да нарисуваме, каквото поискаме на дисплея на контролера на нашият робот!
- #2027
- 01 Jul 2022

Щифтове с или без триене
Понякога искаме някоя част да се движи повече, а понякога по-малко. Ето кои щифтове могат да помогнат с това!
- #2026
- 01 Jul 2022

Как да използваме блокче за контрол на скоростта в SPIKE Prime Word Blocks софтуер
Искали ли сте робота ви да се движи възможно най-бързо? Или пък по-бавно? Ето как!
- #2025
- 01 Jul 2022

Блокче за движение с контрол на посоката в SPIKE Prime Word block софтуер
Имали ли сте нужда да направите завой по дъга? Знаете ли, какво е завой по дъга? Сега ще разберете!
- #2024
- 01 Jul 2022

Завой на място с LEGO SPIKE Prime Word blocks робот
Тук ще научим първият си завой, а именно завой на място!
- #2023
- 01 Jul 2022
За преподавателя: Пазене на дисциплина
Това занятие преподава по-лек и интересен материал за учениците и в комбинация със забавните блокчета, те често се разсейват. Ето няколко напътствия, които могат да ви помогнат.
- #2022
- 01 Jul 2022