

Improving FLL Robot Game. Task. Extend the scissors mechanism
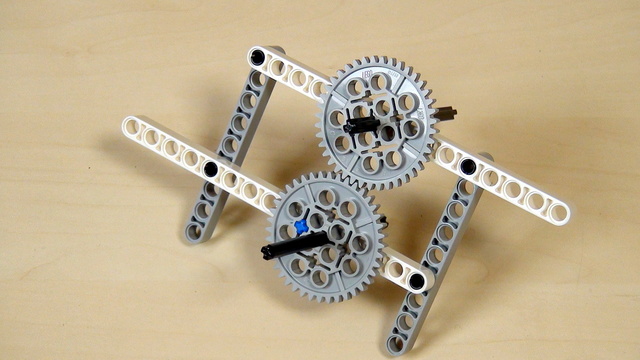
Before moving forward here is the simple task of building the mechanism and extending the legs. Extend the legs to fifteen LEGO units.
- #453
- 21 Mar 2017
Before moving forward here is the simple task of building the mechanism and extending the legs. Extend the legs to fifteen LEGO units.

In this tutorial, we would drive the scissors mechanism and there are a number of rules that we must follow

Experiment with changing the orientation and direction of gear wheels. Here are part of the tasks that you should complete before moving forward with the course.

It this episode we would present you with our attachment for lifting the robot.
One of the very common problems with the LEGO Mindstorms and LEGO Technic Gear wheels is then a tooth is skipped. In this video, I would like us to discuss this challenge and how do we solve it.

Here is the task for adding a beam on both sides of every gear wheel in your attachment.

The most stressed wheel in our system is the driven wheel. We've already fixed the problem with the driving wheel of the scissor mechanism and now it is time to look at the drive LEGO Mindstorms wheel.

Construct two legs for both sides of the robot. The task for this video is to attach this two legs on both sides and to build a system of gears and axles that power those legs.

The important task before the solution. If you haven't done it already, then attach a new axle at the front of the robot and extend the construction with gear wheels and axles to reach the two legs at the two sides of the robot.

Here is our solution for preventing torsion and bending of the LEGO Mindstorms EV3 axles.

This is the first run of Team "Nightbeast", with which they solve M01 and M02 from FIRST LEGO League 2019 Into Orbit:

This FIRST LEGO League robotics video tutorial is about the Treadmill mission and how it could be accomplished. The mission is from FLL 2020 RePlay competition. Almost every year there is a mission of this type where the robot must spend a lot of time with the mission model in order to turn or lift something. These are quite interesting and challenging missions.

This is one of the last tutorials in the LEGO Education SPIKE Prime programming for Competitions course and it demonstrates what we've all been waiting for - how to reach a mission model from base in a reliable and consistent way when the mission model is on the other end of the field. Naturally what we use are all the different concepts that we've learned in the course and the tutorial is more advanced than the other so if anything is not clear take a look also at the different tutorials an concepts in the course.

Using everything that we've learned about LEGO Education SPIKE Prime competition programming we arrive at the final boss mission - how do we consistently reach a mission model at the other end of the field. Consistently. Every time. We use line following, motion sensor, counting of lines and border alignment. All the different concepts that we've looked at separately are now implemented together.

In this video tutorial we use a LEGO MINDSTORMS Robot inventor robot and we do an experiment and a demonstration with it. We demonstrate what is the difference in the consistency and accuracy of the robot when we move slow and when we move fast. For FLL, WRO competitions there is always this balance between moving fast and moving slow.