

Teacher's Note: Solving the tasks for the motorcycle
The goal of this lesson is for students to have fun with a new robot.
- #1446
- 29 Aug 2019
Every teacher/instructor can conduct classes with students using these resources. You need to motivate and organize the students. We provide the technical theory, tasks, instructions, programs and everything needed.
The goal of this lesson is for students to have fun with a new robot.
The goal of this lesson is to introduce students to the setting for measuring the reflected light of the color sensor and to recall how to follow a line.

Third wheel experiments, changes in the robot, students could choose the task all by themselves. Make sure you have a lot of fun and students complete their tasks. Here is what you should know when conducting this class.

The robot should park in the parking positioned in the north-east corner of the field.

At the end of the match the robot is completely in the parking area in the north-east corner of the field: 50 points.

A clutch is a mechanical device that is used for engaging or disengaging power transmission. Now we will see how we can make such a device using LEGO.

Building a rack is a very important skill during competitions. You should try to build one, learn how to use it and have it as a tool for you next robots. But for this particular BoxRobot, we will not continue with a rack.

Using the rack depends on the experience of the team. Based on this a different number of gear wheels and racks would be used.

Build a rack and try to lift the robot with this rack.
The next step of lifting a robot to a mission model is to try to use a rack.

Tips and common mistakes when connecting two beams together.

What is allowed and what is not when building without instructions.

Try to add a touch sensor to the robot on your own.

Why we change the robots all the time and what to observe in each new robot.

Our next robot is called CastorBot, because of the castor ball.

A special fourth case for a turning with robots with two wheels.

Every turn is a circular motion and we will review the three types of turns from this point of view.

Each palette contains programming blocks that share common purpose. We will cover most of them

How important is it to have predictable behavior in your classes.

How can you be sure your image on the display is seen when the program ends?
We will introduce a convention, an agreement, how and in which cases we are going to use each types of blocks.

Using Display, Sound, Wait and Move blocks together.
How to search for an unknown value with the fewest possible tries.

How to make the robot stay idle while the program is still running.

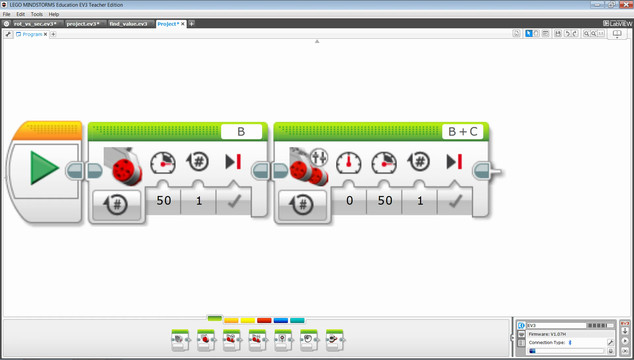
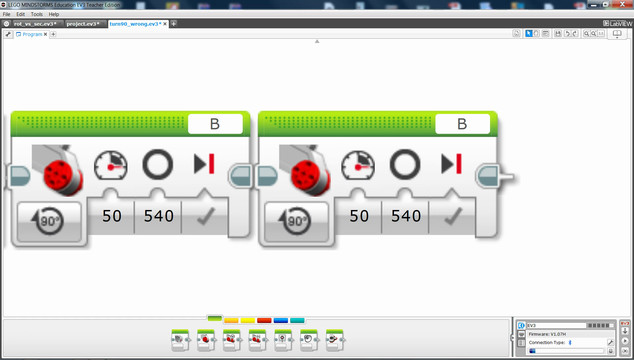
The 90-degree turn of the robot is different from 90-degree turn of the motor!

Explanation and demonstration of the big task for the lesson.

