

Improving FLL Robot Game. Our solution to driving the gear mechanism
It this episode we would present you with our attachment for lifting the robot.
- #456
- 24 Mar 2017
It this episode we would present you with our attachment for lifting the robot.

Нека да разгледаме брика - LEGO Mindstorms EV3 Intelligent Brick. Умната LEGO тухличка.
EV3 брикът е главният компютър на вашия робот. Той има екран, бутони и различни портове.

Here is our solution for preventing torsion and bending of the LEGO Mindstorms EV3 axles.

Before moving forward here is the simple task of building the mechanism and extending the legs. Extend the legs to fifteen LEGO units.

We would continue from the previous program where we used variables and we would change this to arrays.
We will introduce a convention, an agreement, how and in which cases we are going to use each types of blocks.

How to align the wheels and how much should you push for this solution?

We would look at the rules of the competition over our small model and we would start solving the field.

Нека се научим да използваме блокчето на звука.

This video tutorial contains a detailed explanation on how we accomplish the FIRST LEGO League 2018-2019 Into Orbit mission called M04. CRATER CROSSING. These are some of the funniest missions at this robotics competition. Try to move over an obstacle with a robot and if you manage to return back to base without bumping into other mission models that would be great.

Ще ви покажем и друг начин да програмирате робот да се движи назад.

There were a few problems with the 40 teeth gears that we were using. Let's list some of them

В EV3 софтуера за програмиране има Танк блокче за движение. То ни позволява да задаваме различни мощности на всеки мотор.
В живота подобно нещо се използва при автомобилите. Системите за управление на сцеплението с пътя (tracktion control) предават различна мощност към всяко колело на автомобила, така че колата да остане стабилна на пътя и да не поднася.

Building a rack is a very important skill during competitions. You should try to build one, learn how to use it and have it as a tool for you next robots. But for this particular BoxRobot, we will not continue with a rack.

The most stressed wheel in our system is the driven wheel. We've already fixed the problem with the driving wheel of the scissor mechanism and now it is time to look at the drive LEGO Mindstorms wheel.

We are programming this strange construction to move in a square. This is a basic task, but it is worth doing for a robot with motors placed in different directions.

The M08. AEROBIC EXERCISE is one of the very common types of mission in FIRST LEGO League robotics competitions. I think this pattern of missions was first introduced with the growing abilities of the participating students that were constantly reaching the maximum number of points. So the competition introduced mission that require a lot of time - 20-30 seconds, are time consuming and are complex. They requires a lot of moves. This here is a video tutorial on how it could be accomplished

Think of an attachment that leaves the Gecko on the mission model. Don't use the robot attachment that we already have. Just the box robot and the gecko. Nothing should support the Gecko when it is hanged on the mission model.

Ще разгледаме типичните причини защо роботът ви изобщо не иска да се движи.

This video tutorial contains a detailed explanation on how we accomplish the FIRST LEGO League 2018-2019 Into Orbit mission called M08. AEROBIC EXERCISE. This again is a very interesting mission from the competition. We could learn a lot of basic principles in the field of robotics. This mission requires the robot do to something very fast and many times.

In this tutorial, we add another mission to our current program. This mission is - hanging the Gecko from the FIRST LEGO League Animal Allies.

In this video tutorial we would look at the mission run for M05. EXTRACTION. The mission is to collect and return to base a number of objects that are located on the field. Initially when I first saw the mission I thought it wold be quite challenging to accomplish it, but at the end it is not that difficult.

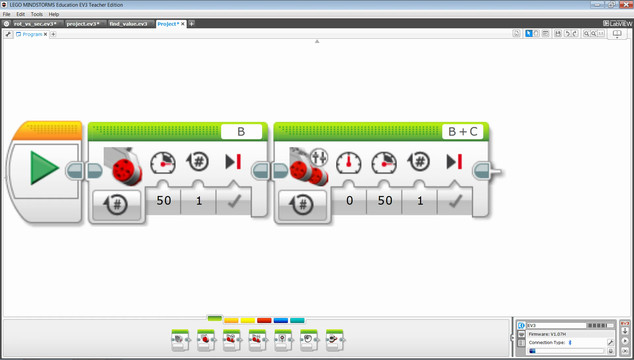
In the course section for Advance Sensor Calibration we previously showed you how to find the minimum and maximum value for a single LEGO Mindstorms Color Sensor and to store this value in an array. The program was implemented with the EV3-G software. In this tutorial we are going to find the Min and Max for all the four sensors and to store all the 8 values in an array.

Преподавателят трябва да се старае да обогатява речника на учениците си при всеки удобен случай.


