This is a recording of a completely perfect, 10 out of 10 accomplishment of a two-part mission - Train tracks, from the FIRST LEGO League 2021-2022 Cargo Connect competition. Due to the proper use of motion and color/light sensors, the robot is 100% consistent and reliable for a non-trivial mission. Even when the robot makes a mistake, it auto-corrects and compensates for this mistake.
- #2090
- 21 Feb 2023
- 6:45
- LEGO Education SPIKE Prime
- Pull, Line follow, Push, Lever, 10 out of 10, FIRST LEGO League, FIRST LEGO League 2021-2022 Cargo Connect, Attachments, Gears, LEGO Education SPIKE App Word Blocks 2, Scratch, Motion Sensor, Sensors, Light and Color Sensor
Tutorial with explanation
The tutorial with explanation of the program is available in the lesson for this mission - M09. Train Tracks - 100% consistent behavior with more sensors.
How to achieve 100% consistency and reliability
In previous versions of the tutorial we explain the drawbacks and why the "robot sometimes does not" when we don't properly use sensors. Check out M09. Train tracks - two parts mission where only the first uses sensors. For this tutorial we use motion and color sensor, with proper coefficients configuration and we get there. We get to 100%.
English
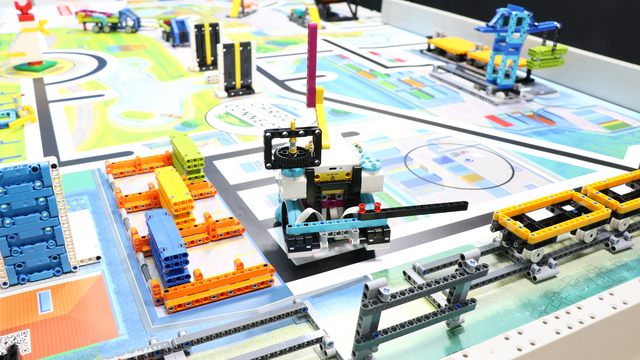
In this tutorial, we accomplished a train track mission model, which is a mission model involving two parts. First fixing the train track and then pushing on this train or pulling till we get to the other end of the train tracks. We use our LEGO Education SPIKE Prime robot to accomplish this complex two parts. And this is a ten out of ten tutorial in which demonstrate how consistent and reliable the robot is. Because of the use of many sensors like two motion sensor and flight sensor, what we see in this tutorial is that the robot makes mistakes, but it compensates for them. It sometimes connects and pushes. On the other mission model, it sometimes the wheel slips, but even though it makes a lot of errors, it compensates for them because of the sensors. Here there are ten runs with our robot, motion sensor and light sensor together move forward. Then we made a mistake. It doesn't matter because we follow the line and we auto-correct it. We wait until we detect the black line and we return. While we return, we follow the line. That's it. First run, it was successful let's see the second run.
This time we didn't hit on the mission model on the left side
and the robot again successfully reached the right side of the screen and accomplished the mission two successful runs. How do we get here? We get here by some kind of positioning and following a line. When we move back, even if we hit on some of the mission models, we correct the error.
Third one, you saw how here we kind of pushed, but then we move forward follow the line and it doesn't matter that the robot made a mistake. Even when the robot makes a mistake, we auto-correct, we compensate for it. This is a general principle that I want to convey here with these ten out of ten tutorials, it is possible to auto correct the robot. It is possible, because of the use of the sensors, to how to correct its behavior. When the robot makes a mistake, we compensate for this mistake. How? By waiting for specific events to occur and these events are the line detect the second line, wait and push on the border or the mission model square the robot so how in the specific example, the previous one, the wheel slipped for like half a second half a second. But even though the robot managed to complete the mission.
Follow, wait for a black line,
complete the mission.
We'll probably show how it made a mistake when it initially completed the first part of the mission. But then it followed the line. It's not the fastest way to follow the line. It's not the smartest way. It's just one of the ways to follow the line. And for this specific tutorial, we've decided to demonstrate this way of following the line, where you take the light, the reflected light, and you multiply it by some coefficients. Check out the previous tutorial where we enter into the programming. You can experiment and you can change it with other ways in which you can follow a line. Possible. It all depends on the context of what robot do you need? Where are the sensors of this robot? I think this is the eight run and we haven't made a single mistake. The robot is consistent and reliable. We managed to complete the mission every time.
Why? Because we use the motion sensor for moving straight and then we use the light sensor to detect and follow lines. We don't even need to square the robot and to align it to the border in this particular mission.
Second to last and one last time, can we do ten out of ten? I think we can.
Completely perfect execution. I hope you like it and I'll see you in the next video.
Курсове и занятия включващи този Урок
Този Урок е използван в следните курсове и занятия.

FIRST LEGO League 2021-2022 Cargo Connect solutions and review with LEGO Education SPIKE Prime
In this course, we demonstrate and explain example solutions for the FIRST LEGO League 2021-2022 Cargo Connect competition. Just like every year, we share solutions only after the season is over. In this course, you will find examples and principles of building attachments and will learn how to program consistent and reliable robots for each mission. You can follow the course, and as you go through each mission, try to replicate the solutions to understand the programs and explanations. Upon completion of the course, you will have many new ideas about how to approach the missions in every FLL robotics competition and how to help your team score more points.
Before starting this course, we suggest you go through the FIRST LEGO League robot game guide
- 55
- 181:18
- 34
M09. Train Tracks - 100% consistent behavior with more sensors
This tutorial explains the use of motion and light/color sensors to accomplish a complex mission split into three parts. It gets into detail about how we keep a straight line with the motion sensor, follow a line with the color sensors, and transition between different parts of the program by aligning and detecting lines with the sensor. The goal is to get to a reliable and consistent behavior of the robot. On top of that, it is configurable, as we've left a few parameters that could be set to configure the behavior for a specific robot, venue, lighting, battery level, and wheels friction.
- 3
- 1
- 2
- 3d_rotation 3