

Improving FLL Robot Game. Introduction to task for Lifting
We've already build a number of resources for lifting at FLLCasts.com. But at the end of this course we would have a robot that lifts itself and hangs on the mission model.
- #435
- 06 Mar 2017
We've already build a number of resources for lifting at FLLCasts.com. But at the end of this course we would have a robot that lifts itself and hangs on the mission model.
The next step of lifting a robot to a mission model is to try to use a rack.

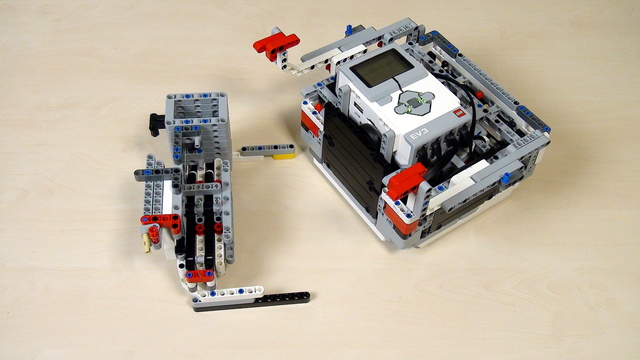
The final way for lifting our box robot is by using a scissors mechanism. In this Episode, we would discuss the benefits and advantages of this mechanism.

Let us do a quick recap of the whole lifting mission and its solution

How should an instructor use this course when working with students and a group of students in school

In this tutorial, we would drive the scissors mechanism and there are a number of rules that we must follow

There were a few problems with the 40 teeth gears that we were using. Let's list some of them

This video tutorial focuses on accomplishing M06 Raise the Mast and M07 Kraken’s Treasure of the FIRST LEGO League 2024-2025 SUBMERGED Challenge using the Nautiq box robot (a LEGO Education SPIKE Prime robot). The run uses a pinless attachment connected to the bottom of the robot, featuring side guides with stoppers for precise mast lifting and a central rubberized section to catch the treasure chest.
The challenge in this run is to collect the treasure before raising the mast fully, as the mission model locks the chest if the mast is lifted too far too soon. The robot must push and lift with great precision, stopping at exactly the right point to avoid triggering the lock, then continue raising the mast to complete the mission. This sequence demonstrates careful mechanical design, accurate programming, and precise timing to accomplish two interconnected missions in one smooth run.

This video tutorial focuses on accomplishing M01 Coral Nursery and M03 Coral Reef of the FIRST LEGO League 2024-2025 SUBMERGED Challenge using the Nautiq box robot (a LEGO Education SPIKE Prime robot). The run uses a pinless motor-powered attachment specifically designed to raise the coral tree to the coral tree support while delivering reef segments outside the launch area. This attachment was chosen after testing multiple designs, and it proved to be one of the most reliable solutions for this task.
The motor-driven lifting mechanism is mounted using long axle pins due to the gearwheel’s position, and a heavy brick is added on top for extra sturdiness, preventing the attachment from popping off during operation. On the side, a simple holder secures the three reef segments collected in previous runs for easy delivery during this mission. This combination allows the robot to lift the coral tree smoothly, place it accurately, and complete the reef segment delivery in a single, well-coordinated sequence.

This is a program that sets the VEX IQ Controller to control the Roberto Bot With Four Bars Lifting Mechanism, and also Sports Chassis With Eight Bar Lifting Mechanism - VEX IQ Robot.

This is a program that sets the VEX IQ Controller to control the Pesho Bot With Two Bars Lifting Mechanism Controls.

This is an 8 bar lifting robot. Way should I build this instead of Roberto bot you ask? Because it is... well... it lift thing straight up, it lift 'em higher, it's more beautiful than Roberto and is more bad ass looking than 4 bar lifting mechanism. OOoohhh, and one more thing it may use the same program as Roberto Bot With Four Bars Lifting Mechanism.
The program si at programs/hb5rj8-pesho-bot-with-two-bars-lifting-mechanism-controls-with-modkit.

This is the good not so old Pesho Bot Chassis with a "two bars" lifting mechanism and a hand. It can be build with any set. Only the omni-wheels are extra, but what is a good robot without an omni-wheels.
The program for this robot is at programs/a6hrcz-pesho-bot-with-two-bars-lifting-mechanism-controls-with-modkit

This program is developed with LEGO Education SPIKE App Word Blocks and is used to accomplish a Power Switch mission model with a heavy lifting attachment attachment placed on Luly, small LEGO Education SPIKE Prime competition robot with 3D building instructions.

This program is developed with LEGO Education SPIKE App Python and is used to accomplish a Power Switch mission model with a heavy lifting attachment attachment placed on Luly, small LEGO Education SPIKE Prime competition robot with 3D building instructions.