This attachment is meant to be built on the robot Francesco 2. When the red connector for the transmission connects the two axles for the rear gear wheels, the differential locks and the motor starts evenly transferring its power to both wheels.
When the red connector for the transmission is pushed to the side, the differential unlocks and once again transfers its power to the wheel with least resistance.
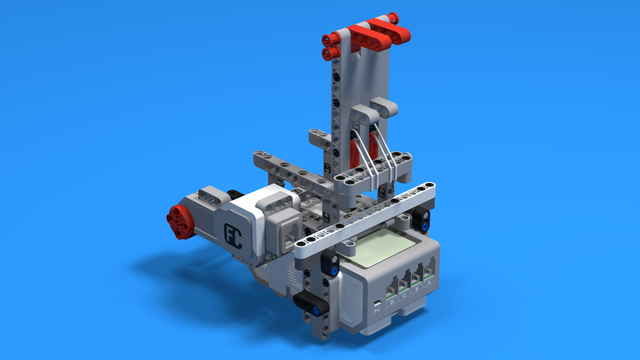
You can see empty beams hovering over this attachment. They are there so you can attach a lever construction over it, to help with the locking and unlocking of the differential. Similar leaver can be seen in the robot Catapult.