FLL 2025: Rules for M04 Careful Recovery FIRST LEGO League 2025-2026 UNEARTHED Challenge
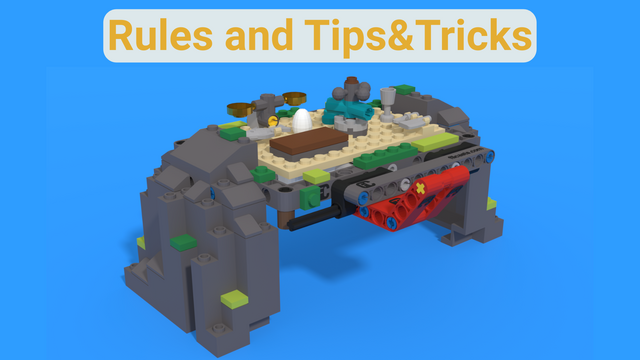
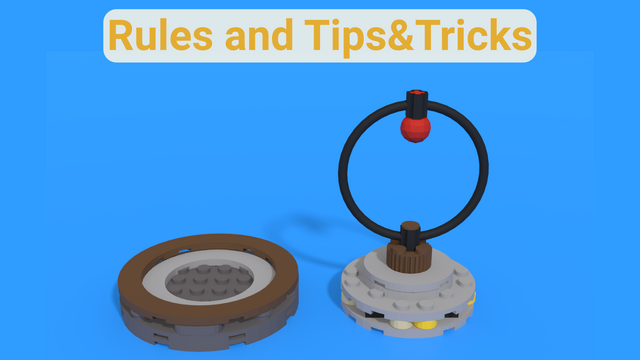
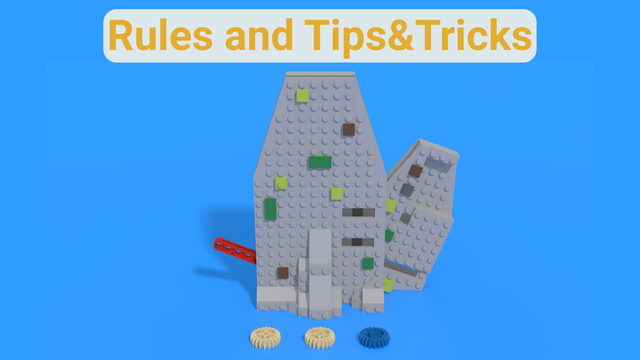
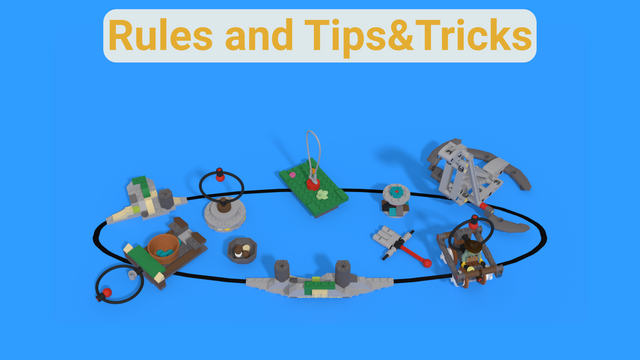
When parts of a site are too dangerous for humans, technology can help safely recover artifacts. Carefully extract the precious artifact from the mine, ensuring the site remains stable.
No Equipment Constraint: The mission model cannot earn points if it is touching equipment at the end of the match.
- #2468
- 17 Aug 2025