

WRO Elementary 2015. Field Run. Part 2
Showing the same run, but from a different angle. This allows you to see more of the way we sensors work and how exactly the robot positions itself.
- #192
- 27 Dec 2015
Showing the same run, but from a different angle. This allows you to see more of the way we sensors work and how exactly the robot positions itself.

This video tutorial is about understanding the "magic". In this video tutorial, we would conduct an experiment and will look at how exactly does the integral part of the PID algorithm compensate for the error that the LEGO Mindstorms EV3 robot makes.

In this video tutorial we try to move forward with a LEGO Mindstorms Robot Inventor robot and we try to keep a straight line using the Motion Sensor. Without entering into the details of the programming we demonstrate what is the behavior of the robot when trying to keep a straight line with the Motion Sensor while we are participating in a FIRST LEGO League competition.
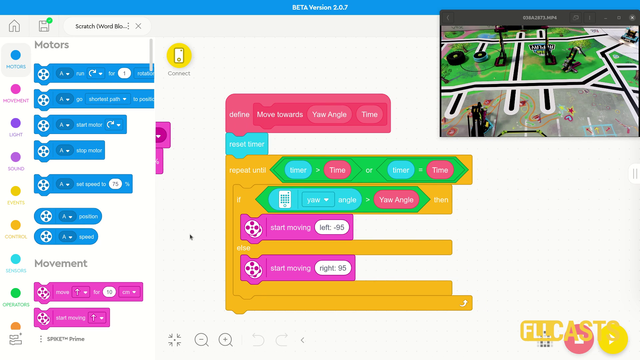
In this video tutorial we use the LEGO Education SPIKE Prime Motion Sensor to reach a mission model on the field. It's a basic use of the motion sensor that we will extend in the next few tutorials and in the same time we take the opportunity to demonstrate what a MyBlock is and how to develop one. As a result of this video you will learn how to make the program easier to read and maintain by organizing the blocks in the program in special MyBlocks that couple them all together.

Is it better to do fast turns or slow turns? Should you save some time by turning fast or should you be more precise by turning slow. Where is the balance? This video tutorial demonstrates exactly this for LEGO Education SPIKE Prime robot, their motion sensor and an ever occurring question on FIRST LEGO League competition which is how to find the balance and where is the balance.
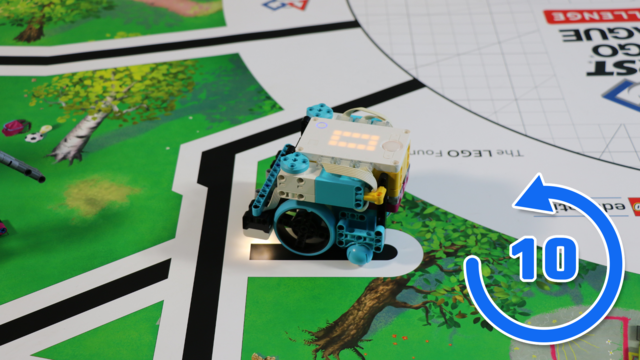
This LEGO Education SPIKE Prime video tutorial demonstrates the difference in turning slow and turning fast and using the Motion sensor to understand the orientation of the robot. We do 10 consecutive runs. The goal is to understand what can you expect from the robot behavior in terms of consistency.

In this video tutorial we demonstrate the behavior of a LEGO Mindstorms Robot Inventor robot when we use the Motion sensor. The Motion sensor was also referred to as Gyro sensor in previous versions of the LEGO Mindstorms Robot. We do not enter into the details of the programming and you can download the programs from the course lesson, but we make a demonstration of how the robot turns to about 95 degrees when we try to turn it to 90 degrees, we explain why and we suggest a way to improve the behavior of the robot.