
Improving FLL Robot Game. Using a rack for Lifting.
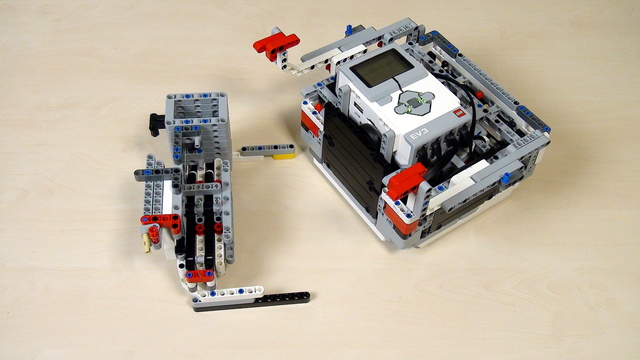
The next step of lifting a robot to a mission model is to try to use a rack.
- #448
- 05 May 2017
The next step of lifting a robot to a mission model is to try to use a rack.

Next important state is Turn Right with our robot. This happens when we detect a line on the right.

Tasks for STEM classroom and home exercise to get you used to using the LEGO Mindstorms Touch sensor. Solve them, build a program, record a video and upload your solutions below.

Many teams have followed the same idea as the ELM team. To build a LEGO Mindstorms attachment for the robot and to lift the truck very lightly. In this way they could more the truck and place it in the special region. See what the ELM idea was.

This second part continues with importing two previously developed in Episode 53 blocks into our program. With them we can for align to lines. We program the robot to align to the cross line and start following it.

In this tutorial we demonstrate how a Drop Mission could be accomplished with a Drop Attachment. The robot attachment could be adapted to other drop missions in FIRST LEGO League/World Robotics Olympiad and other robotics competitions. The principle is the same. The tutorial uses Luly, small LEGO Education SPIKE Prime competition robot with 3D building instructions as a robot base.

We've already build a number of resources for lifting at FLLCasts.com. But at the end of this course we would have a robot that lifts itself and hangs on the mission model.

Go to the missions model. Do the missions. You can then continue to the next mission or wait a few seconds at this FIRST LEGO League 2015 Trash Trek mission model and receive a few more points. Isn't it interesting. The ELM team has build a LEGO Mindstorms attachment for this robot. Let's see how it works.

We show the principle of solving the next FIRST LEGO League (FLL) Nature's Fury 2013 competition missions. Again, without any programs, but just the principles of using one attachment for most of the missions.

We challenge you to build a construction of cardan joints that transfers power to a maximum angle. Submit your solutions to [email protected] and win an award. Use the challenge in home or in the classroom. Initial Deadline is 18 of Aprill 2015.

In this video tutorial we look at Acceleration and Deceleration with a LEGO Education SPIKE Prime robot. The goal of the tutorial is to demonstrate the accuracy of the robot when we us default acceleration and slow acceleration.

This video tutorial contains a detailed explanation on how we accomplish the FIRST LEGO League 2018-2019 Into Orbit mission called M09. STRENGTH EXERCISE. I could think for a couple of missions in previous years that require lifting a heavy object. Let's see how this mission could be accomplished.

Build a rack and try to lift the robot with this rack.
We are working on the World Robotics Olympiad (WRO) 2013 competition and its elementary part. The series will introduce three different concepts and this would be Arrays, Menus and Counting different lines. In the video you will see the robot working as it is in the final stage.
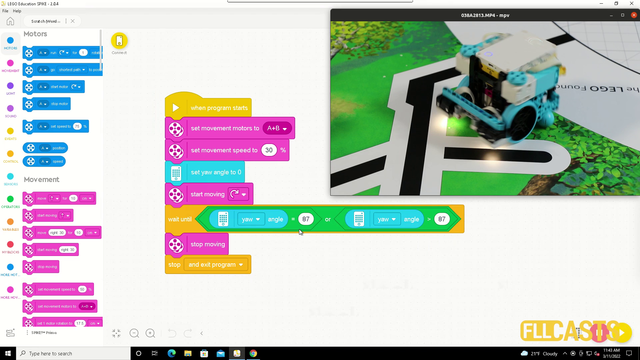
In this video tutorial we demonstrate the use of the motion sensor and how it could be use to turn precisely to 90 degrees. We demonstrate some of the caveats of the sensor and how sometimes it does not work as expected. Like you set the robot to turn until the sensors detects 90 degrees and at the end the robot is not at exactly 90 degrees.

Next state in our state machine programming pattern is the "Turn Left" state and the corresponding behaviour.

Let's record the values of the Gyro Sensor while the robot is moving and is trying to keep its orientation straight. This is an interesting experiment and we will have to use file access to write the values to a file.

We can Turn Right. We can Turn Left. How do we decide which way to go if there are lines both to the left and to the right. Check out the video.

A robot that contains balls and releases them. It counts how many balls to release depending on the "treasures" it has hunted on the field. This is part of the World Robotics Olympiad 2015 Elementary challenge.

Raw footage of the mission. Might upload a more polished version soon

We have previously aligned to lines with the Color Sensors. In this series we are doing the same program, but with Ultrasonic Sensors that are aligning the robot to a Wall.

Part four of the Catapult series is again about loading the catapult automatically but this time using EV3 brick, motor and sensor. We use a gear system with a medium complexity along with a "standard clutch" available in the LEGO Mindstorms EV3 kits. As a result, at the end of the video, the Catapult loads and fires automatically.

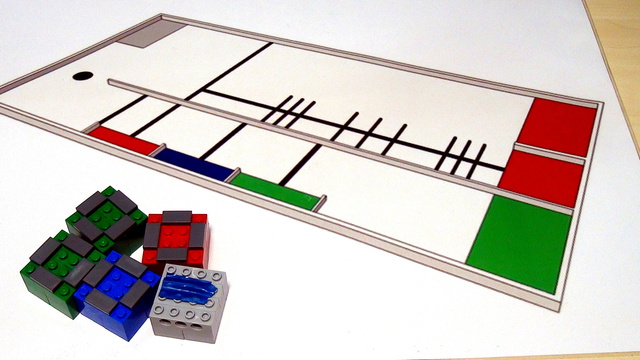
Moving in a grid of objects. That's the large challenge of the World Robotics Olympiad 2015 Junior-High 2015. In this video we would build a robot that can collect the boxes (treasures). The robot would also be able to move around the treasures.

This video is part of a series where we show you how our Box Robot accomplished the M08 Elevator mission with 100% accuracy. The idea is that the robot pushes with enought force in the right spot, which makes the elevator turn over. The interesting thing is that the Dominator robot moves the lever after it pushes the elevator. This makes the move back possible, because the lever is now not in the way of the mission model.

The third part of the series the goal is to extend the robot attachment so that we could solve the second part of the FIRST LEGO League World Class mission challenge - to take the loop.
![Image for [How NOT To] Build An Active Attachment For SUV Box Robot](https://d2nmr6p48f8xwg.cloudfront.net/content_pictures/pictures/000/002/747/dd1e2e4891f89a09cc95df3c462236632bbf60d8fllcasts-competition-fll-robot-lego-mindstorms-attachment-that-is-no-good-038A5726.JPG)
The video shows why you should not build attachments such as "Crappy Active Attachment For SUV Box Robot". In the video one can see how the knob gear wheels start "jumping", once a force is applied to the lever.

In this video tutorial we would look at the mission run for M09. STRENGTH EXERCISE. The mission is to lift a heavy object in the air. And that could a complex mission. It requires to use gear wheel and the attachment should be quite strong. The tutorial contains only the mission run on the field. We accomplish a single mission.