

WRO Junior-High 2015. Treasure Hunt. Part 2. Rules
We would look at the rules of the competition over our small model and we would start solving the field.
- #199
- 10 Apr 2016
We would look at the rules of the competition over our small model and we would start solving the field.

Continuing with the Proportional algorithm for following lines. Smooth and stable this is the first part of the PID.

How do you detect a cross-section and move from following the main line to following the crossing line. In this series of video tutorials we are starting with a very simple solution that could work in most of the cases. It is especially useful for the FIRST LEGO League Trash Trek competition where there is such a section.

One of the smartest things you could do in any software program is to extract logic in small reusable, simple, understandable units. In EV3-G these are called Blocks and we are going to extract the logic for finding a minimum and maximum for each of the sensors in a new block.

Нека да разгледаме брика - LEGO Mindstorms EV3 Intelligent Brick. Умната LEGO тухличка.
EV3 брикът е главният компютър на вашия робот. Той има екран, бутони и различни портове.

Какво е цвят? Как нашият робот го вижда? Научете това тук!
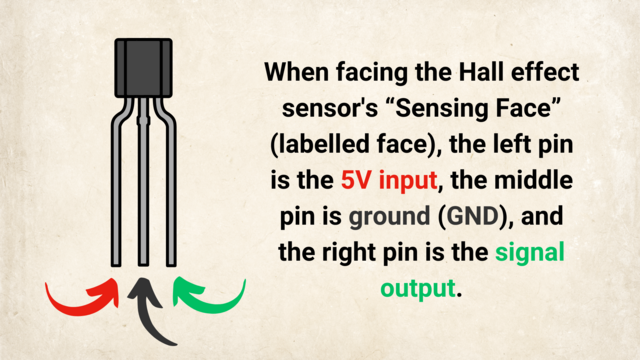
What Is a Hall Effect Sensor?
A Hall Effect Sensor is a small electronic component that detects magnets. When a magnet comes close, it sends a signal to other devices, like an Arduino or an LED light. Think of it as a tiny switch that turns on whenever a magnet is nearby.
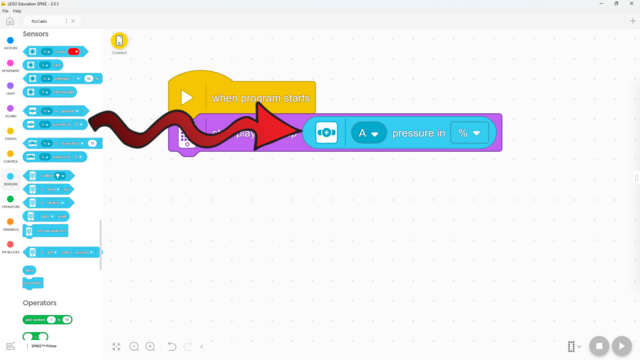
Сензора за сила може да засече колко силно го натискаме! Ето как:

Following the previous tutorials from the course, implement the calibration of the minimum and maximum values.

With this 10 runs we demonstrate the consistency and reliability that could be achieved with a LEGO Education SPIKE Prime robot and a 2-states simple line following algorithm. It is not bad. Still there are some things you should consider when using this program and one of the things is the use of the timers

From programs that rely entirely on proportional line following to those that use a PID-type program where "P" stands for the proportional line following component, proportional line following has proven to be a core mechanic in line following competitions.

So far, we’ve explored a line-following algorithm commonly referred to as duck walking. Let’s take a closer look at how it works and consider how many distinct states it actually involves.

PID is the most popular method for programming line-following robots. It’s a bit complex, so this tutorial is longer, as we’ll break it down into steps and explain each element of the equation.
This approach to programming line-following robots is not ideal for beginners. Attempting to learn this as a first step in competition preparation may give a misleading impression of the competition's complexity and could discourage students from learning the necessary skills to compete in this category.


Then the problem lies in other external factors.


In this video tutorial we accomplish the FIRST LEGO League 2022-2023 SUPER POWERED mission called M04 Solar Farm. We use the chain monster box robot along with a passive attachment that helps us collect 3 of the energy units. The interesting thing about the mission is the collection of the units, of course, but also the way this robot manoeuvres when there is not enough space. It aligns to the lines, it uses the color and motion sensors. Really advance way to align the robot.