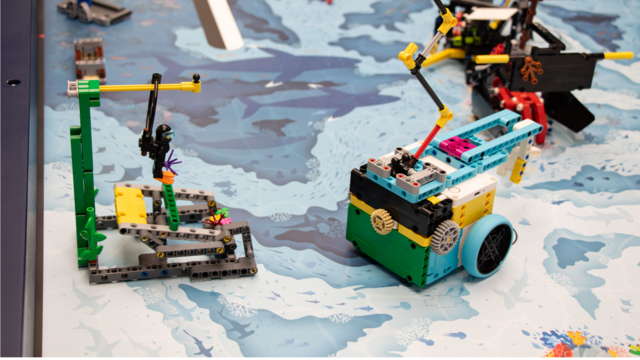
This video tutorial focuses on accomplishing M01 Coral Nursery, M02 Shark, M03 Coral Reef, and M04 Scuba Diver of the FIRST LEGO League 2024-2025 SUBMERGED Challenge using the Nautiq box robot (a LEGO Education SPIKE Prime robot). The run uses a two-part pinless attachment designed to complete multiple missions in a single sequence. The small angled surface mounted under the robot flips the coral buds from M01 and pushes the shark from M02, while the front arm catches and delivers the Scuba Diver from the coral nursery to the coral reef support.
The back section of the attachment flips the coral reef from M03 using a friction-pin mechanism that stays straight during travel but drops the horizontal arm at the mission model to push the yellow plate and raise the coral reef. Extra axles on the front arm prevent the Scuba Diver from falling during delivery, ensuring reliable scoring. This coordinated multi-mission approach maximizes efficiency by combining pushing, collecting, and delivering into one smooth run.