

Improving FLL Robot Game. Task. Fix attachment to make it durable and stable
Following the principles from the previous video, try to make the attachment that you've built, more stable and durable.
- #464
- 03 Apr 2017
Following the principles from the previous video, try to make the attachment that you've built, more stable and durable.

In this video we discuss the durability of the construction of LEGO robots and how do we make them more durable.

Here is our solution for preventing torsion and bending of the LEGO Mindstorms EV3 axles.

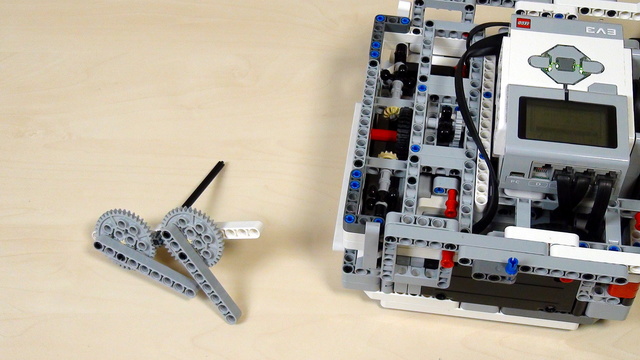
The important task before the solution. If you haven't done it already, then attach a new axle at the front of the robot and extend the construction with gear wheels and axles to reach the two legs at the two sides of the robot.

Construct two legs for both sides of the robot. The task for this video is to attach this two legs on both sides and to build a system of gears and axles that power those legs.

The most stressed wheel in our system is the driven wheel. We've already fixed the problem with the driving wheel of the scissor mechanism and now it is time to look at the drive LEGO Mindstorms wheel.

Here is the task for adding a beam on both sides of every gear wheel in your attachment.
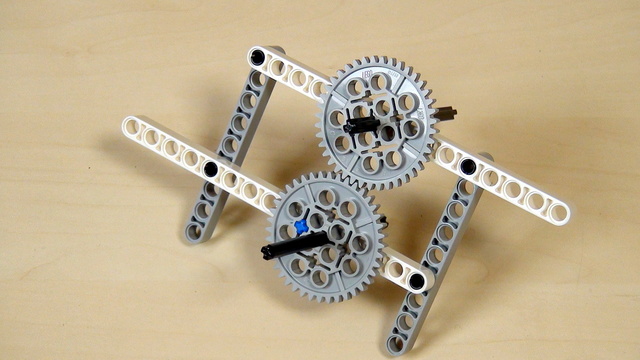
One of the very common problems with the LEGO Mindstorms and LEGO Technic Gear wheels is then a tooth is skipped. In this video, I would like us to discuss this challenge and how do we solve it.

It this episode we would present you with our attachment for lifting the robot.

Experiment with changing the orientation and direction of gear wheels. Here are part of the tasks that you should complete before moving forward with the course.

In this tutorial, we would drive the scissors mechanism and there are a number of rules that we must follow

Before moving forward here is the simple task of building the mechanism and extending the legs. Extend the legs to fifteen LEGO units.

The final way for lifting our box robot is by using a scissors mechanism. In this Episode, we would discuss the benefits and advantages of this mechanism.

In this episode we will show you how to build the FiveMinuteBot. We will make a quick overview of this Mindstorm Robot.

In the EV3-G software, you could use negative numbers for power and rotations. In this episode, we would look at what is the meaning of this numbers and make a few notes of where the teacher must be more careful.

Once you start turning how to do you a whole 180 degrees turn. The robot almost does it, but not completely

There is the Move Tank programming block in the software. It allows us to set different power to each motor.
In real life, the same concept is used in cars, for example. The traction control systems apply different power to different wheels, so that the car is more stable on the road during turns or on slippery road.

We will share the idea behind that challenge and how to conduct the challenge in a classroom.

Let's make a competition - there is a pole that the robot must turn around and return home.

Now that you have tried and solved a challenge involving a series of instructions, we would like to share with you a few best practices.

Specific challenge on programming the robot to move as a Yo-Yo

How to align the wheels and how much should you push for this solution?

There were a few problems with the 40 teeth gears that we were using. Let's list some of them

Build a similar mechanism to this one. Similar, but for your robot. This is the task for you. Try, give yourself half and hour or even an hour.
Time to lift the robot. The first approach is by using the 40 teeth gear wheels that come with the LEGO Mindstorms EV3 and NXT robotics sets.

Remember the passive/active attachment separation that we are making at FLLCasts.com. This applies for all the attachments and in this Episode, we are looking at how to use a passive attachment.
