Construct two legs for both sides of the robot. The task for this video is to attach this two legs on both sides and to build a system of gears and axles that power those legs.
- #460
- 28 Mar 2017
- 2:40
- LEGO MINDSTORMS, LEGO MINDSTORMS EV3
- FIRST LEGO League, EV3, Construction, Classes with students, FLL
Important things about the lego axles
Torsion and bending
Torsion
When part of the axle moves while the other stays in place. This is very visible when using LEGO Mindstorms axles that are built from plastic but is a general effect even if you have steel axles.
Bending/Sagging
This could permanently deform the axle or even break it.
English
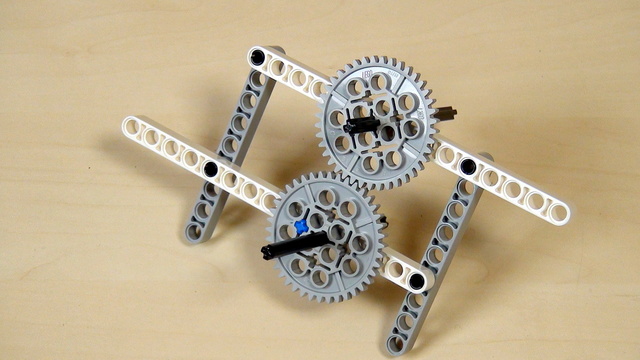
In the Box Robot we have the motor at the front of the robot and the axle right here, we have two of the legs that are on each side of the robot that will lift the robot, we know how to change the direction and the next task is to discuss some of the rules for extending the axle. So, if you change the direction right here at the front of the robot then you must extend the axles so that you can reach actually the scissor mechanism. Two things you should know about the axles. We have the Lego axles, we have a black one and a gray one and I'll add these two beams right here. When we apply some force on the axle and try to rotate the axle what can actually occur is torsion. Where one side of the axle is actually not rotating while there is force on the other side of the axle that tries to make the axle rotate. And this is the result. It happens mostly because the parts are from the parts are from plastic material but even if you have them from steel depending on the forces on the two sides of the axle, it can again happen. And this is the first problem that we should address. To prevent the axles from torsion. The next problem with the axles is sagging or sometimes referred to as bending. So, you remember torsion, like this. And we have the axle and we apply some force on this side of the axle and it can do this, it can bend. That's called sagging. And this could break the axle or it could permanently deform the axle. And these are two of the problems that we face when we move when we transfer power from the motor that's at the front of the robot to the side of the robot. So, we must use axles and probably there will be some torsion and some sagging of these axles that would make the whole mechanism work incorrectly or probably not work at all.
Courses and lessons with this Tutorial
This Tutorial is used in the following courses and lessons

FIRST LEGO League (FLL) 2016-2017 Animal Allies. Review of solutions with explanations
The course contains a number of sections with specific examples and tasks on how you could improve your FIRST LEGO League (FLL) robot game in order to achieve more points. It is designed mostly for after season teams that would like to prepare for next year, but could also work for teams that are currently working on their competition robots.
- 48
- 118:45
- 15
Extending gears drive (Coming soon)
One of the very common problems with the LEGO Mindstorms and LEGO Technic Gear wheels is then a tooth is skipped. In this video, I would like us to discuss this challenge and how do we solve it.
- 6
- 0
- 2
- 3d_rotation 0