

За преподавателя: Блокчета за звук и дисплей
Как да поддържаме дисциплина в клас и как да ободряваме учениците.
- #393
- 25 Apr 2017
Как да поддържаме дисциплина в клас и как да ободряваме учениците.

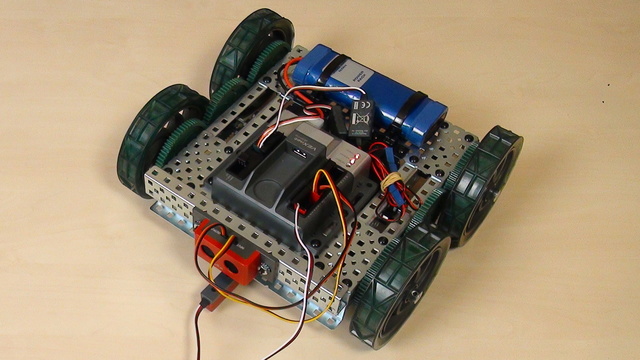
Spinning with the VEX EDR robot involves the use of both motors. The left and the right. Every robot with wheels could spin and this makes not exceptions.

The scorpion is one of the most famous robots build with the NXT kit. In this lesson we are showing how to use the rotation sensor to program the scorpion and its strikes. The main challenge is how to return the spike for the same amount of degrees after it strikes. The other topic is how to use variable to keep the state of the scorpion. Both of this techniques are very valuable during the competition.

Where is the math while turning? Is there any math involved? Should there be?
The next important step when turning with a robot is to learn how to do an Arc turn.

Without the use of the sensors, make sure that you are at least using "set movement acceleration to slow". In this tutorial we will demonstrate why and how this helps us improve the accuracy and consistency of the robot.

We need to extend the cables to be able to connect them to our Raspberry PI. We must also add new connectors at the end of the cables.

How does this construction of VEX EDR turn? It has two motors. Let's start with turning right

This is an animation of a quick pinless attachment that is placed below the robot and is used to deliver parts, like the Container Mission model, to different parts of the field. In the live video in the lesson we explain more about the principles, while here in the animation you can get a quick overview of how it works and you can try to follow the same principles for an exercise.

This video tutorial contains a details explanation on how we accomplish the FIRST LEGO League 2018-2019 Into Orbit mission called M06. SPACE STATION MODULES. This again is a very interesting mission from the competition from which we could learn a lot of basic principles in the field of robotics.

Following the principles from the previous video, try to make the attachment that you've built, more stable and durable.

Как да помогнем на учениците да разработват дълги програми.

In the current course we would use a number of languages. Generally we would program the robots in EV3-G, but we would also program them in JavaScript to make the parallel with the JavaScript. The programming would include arrays, switches and loops.

This is a 10 out of 10 video tutorial for the Slide mission at the FIRST LEGO League 2020 RePlay LEGO robotics competition. In the tutorial we demonstrate how to accomplish the mission 10 out of 10 times. At FLLCasts we try to build the attachments to be as consistent in their behavior as possible possible. In this way you know how the attachment along with the LEGO Education SPIKE Prime or LEGO Mindstorms robot will behave.

Give it a name and you will have power over it. I learned this from an MIT professor. So let's give the part of the car names. Then we could refer to them. Talk to them. Change them. Do all kinds of things with them. Give it a name and you will have power over it.

In the previous video, we found the correct answer for our task and it is 18.75, or is it?

In this video tutorial we demonstrate a few ways to use the Distance sensor from the LEGO Mindstorms Robot Inventor on FIRST LEGO League competitions. We don't enter into the details about programming as we do in the LEGO Mindstorms Robot Inventor Programming course, because here we demonstrate the behavior of the robot when the sensor is use and we make the argument that you should always use sensors at FIRST LEGO League competitions

In this video tutorial we accomplish a robotics competition mission model and we accomplish it 10 out of 10 times. The mission is Pull-up from the FIRST LEGO League 2020 RePLAY competition. The goal of the mission is to pull up the robot on the bar. The robot must not be touching the ground.

In this video tutorial we accomplish the Innovation project mission from the FIRST LEGO League 2020 RePlay competition. The goal of the mission is to build a new construction on the day of the competition and to complete a mission with this new construction. There are a couple of spare parts in the FLL set and building the construction for the innovation project was quite fun.

In this tutorial, we would build a simple program for controlling the Tetrix robot motors with the GamePads. We use the stick and when the stick is pushed forward the motors move forward. When it is pushed backwards the robot moves backwards.

There are a number of tools available online to help you play the game. You just seed the initial conditions and leave the game. Let's look at some of the sites.

This animation demonstrates the use of a Grab Attachment build from LEGO Mindstorms Robot Inventor 51515 set. Many of the FIRST LEGO League missions could be accomplished by grabbing the mission model and the principles shown here is useful for mission models that look like a loop

We will explain inertia non-scientifically so that we make it easy to understand concept.

There are number of settings in a Move block and now we will focus on the rotations setting

Display a matrix with "life" and "dead" cells on the EV3 LEGO Mindstorms brick screen. The program is available. You can see it, change it, modify it and learn from it.

In this video tutorial we demonstrate the user of a quick 'pinless' attachment. As all pinless attachment it is not that they are completely pinless, but that they do not require the "click" of the pins that is often difficult to achieve in a quick pace environment as during FIRST LEGO League competition rounds.

In this video tutorial we demonstrate a robot attachment that could be used to lift loops and other objects. Almost every year there is a mission at FIRST LEGO League competitions that involve lifting and the principle is interesting. You can build the attachment, robot and mission model from a single LEGO MINDSTORMS Robot Inventor 51515 set and learn a principle of building an attachment for lifting.