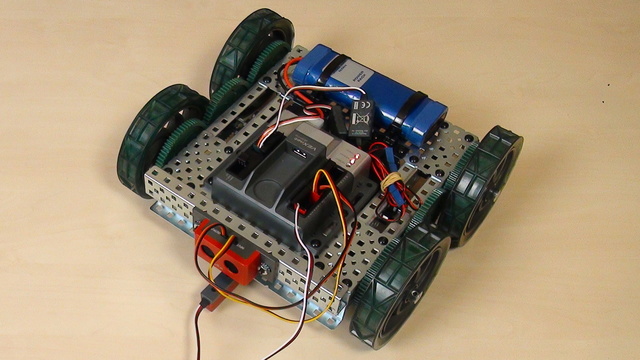
Tetrix Gamepads. Simple program for moving the robot with the gamepads
In this tutorial, we would build a simple program for controlling the Tetrix robot motors with the GamePads. We use the stick and when the stick is pushed forward the motors move forward. When it is pushed backwards the robot moves backwards.
- #515
- 15 Apr 2017