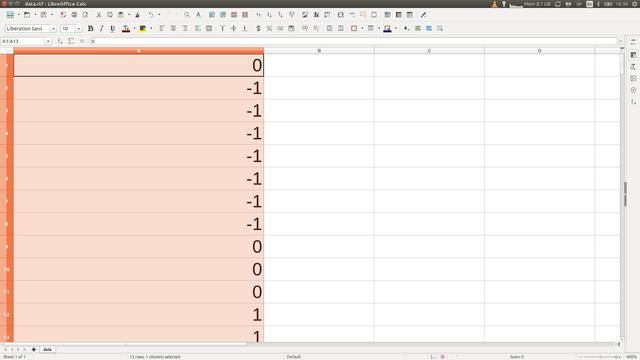
Datalog of the Gyro sensor when moving forward and keeping the orientation straight
The data log from the experiment when moving forward and keeping straight with an implementation for Proportional compensation.
- #389
- 10 Jan 2018
- 1
The data log from the experiment when moving forward and keeping straight with an implementation for Proportional compensation.

It's the third version of the VEX IQ Easy Bot with rotated Robot Brain and castor wheel.

It's the second version of VEX IQ Easy Bot. It's simple as the first one, but the motors are rotated.

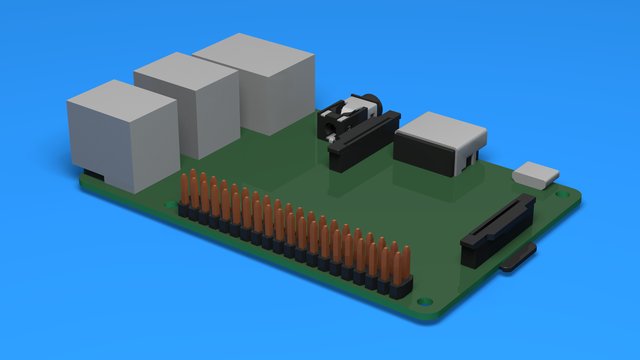
A 3D scheme on how to connect the front steering motor to the Raspberry PI. This includes the Motor Driver and the batteries. The rear motor is also on this scene.
Step by step guide on how to add the SD card to the Raspberry pi.
The Raspberry Pi must not be powered.

3D scheme on how to connect the L298N Motor Driver to the Batteries. Follow the step-by-step instructions. Be careful about the PCB terminal connectors.

3D scheme with instructions on how to connect the L298N driver to the batteries and to the motor. Just that. Connecting to the Raspberry Pi is at a later stage of the course.

