
Rack attachment for lifting built with LEGO Mindstorms EV3
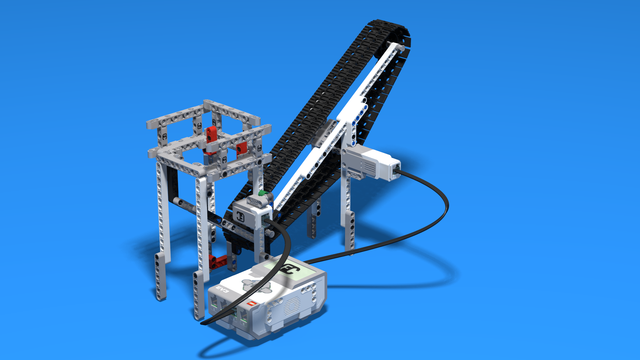
This construction demonstrates one way of using а rack with a gear wheel. It allows to turn circular motion in to a liniar one.
- #638
- 01 Feb 2019
- 4
This construction demonstrates one way of using а rack with a gear wheel. It allows to turn circular motion in to a liniar one.

A turtle robot with 2 sensors- ultrasonic and gyro, capable of following her course and navigating through anything. Just don't annoy it, or it will hide in its shell or even come and bite you.

An awesome ski-jet robot, steering with a medium motor and powered by a single large motor. It also has a pair of inclined treads, making it especially well-suited for the harsh winter terrain.
*There is a mistake in this robot you will have to find. How would you make it work?

Alice is a lovely little bird, with some amazing mechanisms on her feet. It uses two large motors and one medium one as a head, which drives both its wings.

The GorillaBot walks on its two arms, using two large motors as forearms. It also has this awesome head, which actually is pretty useless as an ultrasonic sensor, unless you lift its eyebrows.
Whitiki comes from Maori and means Belt.
The robot uses a medium motor to run the belt and a color sensor to identify the color of the ball coming in. There are 56 chain pieces in the robot.

This is a little robot that doesn't like its switch touched. It will return the switch back every time it's touched and react in a variety of ways.
The program for controlling the robot is available at /programs/wc7iqy-program-for-ev3-finger-bot

A fearsome and dangerous robot. It will find a place to hide and patiently wait in ambush.
NB! This robot requres bluetooth connectivity, as its USB port is blocked in the construction.

This is a vehicle that is used to help you to learn programming, to experiment with addons, attachments and constructions. It has a frame. Which is nice. A frame is always nice.
It has two wheels at the back, but this is needed only if you have them.

Sebastian is a six-legged creature, which technically makes it not-a-crab. Anyway, it still walks sideways and is amazing to build and watch.
You can find the program for Sebastian here.

Here is an idea. What if a robot does not need attachments. What if there is one special attachment on the front that could do most of the work? Probably an attachment that allows you to move a lever in any direction.
This here is a Box Robot with X - Y axys plane. This robot doesn't need active attachments because it has X - Y table that do the job. Imagine that there is a plane on the front of the robot. With the rack mechanism you can move to any coordinates on this plane.
We have a lot of ideas how to make it even better. We will try to release them in the next few versions.

This is a module containing two sets of three legs to make the ideal hexapod insect! The two sets are each powered by a large EV3 motor which are connected in various ways to the three legs to move them like a real bug! You can combine this module with others to build a bug robot.

This is a movement module, that works like real boat paddles! It consists of two paddles, each connected to a large EV3 motor. The module can be connected with other modules to make a robot that moves like a boat!

This is a steering mechanism made to look like a fish tail, so that you can make the coolest fish robot that steers like a fish. It uses a medium motor to move left and right. You can combine it with other modules to make your sea creature robot with a tail!

This is a robot, designed to easily lift a cup, while still holding it upright. The robot uses one motor attached to the brick to lift the cup to any angle you want. The cup we have added is purely cosmetic, but with a few adjustments, you can make it lift real cups. Be careful around liquids though!