

Blocks Package for Advanced Calibration of LEGO Mindstorms EV3 Color/Light sensors
This package contains the three blocks used in the advanced calibration section of the FLL course.
The blocks contained are:
- InitiArray block
- CalibrateMinMax
- GetCalibrateValue
- #cwqkuo
- 04 Oct 2017

Color sensor stops at third line
- #w9bjrt
- 24 Oct 2015


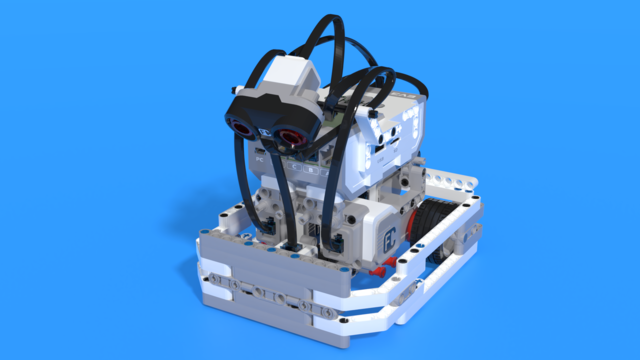
Omusbot - LEGO Mindstorms EV3 sumo robot
Can you find out why the robot is called "Omusbot"?
The robot is made as a nice base for more advanced LEGO Sumo competition. It uses two motors, which are put on backwards for more traction. On the front, it has a color sensor, which detects the border line of the field. Over them, there is an ultrasonic sensor, that detects the enemy robot. Finally, on the back, the robot has a touch sensor to detect if it is being pushed.
- #952
- 01 Dec 2019

Python program to align to a line with color sensors from LEGO Education SPIKE Prime
This program is developed with LEGO Education SPIKE App Python and is used to make the Luly, small LEGO Education SPIKE Prime competition robot with 3D building instructions align to a line with two color sensor. It's a mechanism we've used with EV3, NXT and now SPIKE.
from spike import PrimeHub, LightMatrix, Button, StatusLight, ForceSensor, MotionSensor, Speaker, ColorSensor, App, DistanceSensor, Motor, MotorPair from spike.control import wait_for_seconds, wait_until, Timer from math import * hub = PrimeHub() color_sensor_E = ColorSensor('E') color_sensor_F = ColorSensor('F') motor_A = Motor('A') # Set the motor port to the motor. motor_B = Motor('B') # Set the motor port to the motor. motor_A.set_default_speed(-30) # Set the default speed of the motor. motor_B.set_default_speed(30) # Set the default speed of the motor. motor_A.set_stop_action('brake') # Activate the brakes when the motor stops. The other conditions are 'hold' and 'coast'. motor_B.set_stop_action('brake') # Activate the brakes when the motor stops. motor_A_flag = 0 # Create a flag for motor A and set it to OFF. motor_B_flag = 0 # Create a flag for motor B and set it to OFF. def stop_at(colour): motor_A_flag = 0 # Reset the flag for motor A to OFF. motor_B_flag = 0 # Reset the flag for motor B to OFF. # Move forward. motor_A.start() motor_B.start() while (motor_A_flag == 0) or (motor_B_flag == 0): # Repeat while both sensors ever detect black color. if color_sensor_E.get_color() == colour: # If the color sensor on port E detect the desired color motor_A.stop() # stop the motor an port A and motor_A_flag = 1 # set the flag for motor A to ON. if color_sensor_F.get_color() == colour: # If the color sensor on port F detect the desired color motor_B.stop() # stop the motor an port B and motor_B_flag = 1 # set the flag for motor B to ON. stop_at('black') stop_at('white') raise SystemExit # Close the program.
- #p2ghxe
- 17 Mar 2021

Varna - a sumo Robot from LEGO Mindstorms EV3
Nice idea. Lift the other robot and throw it in the air. Not easy, but Varna is trying to do it. It's a quite powerful robot with small wheels and gear ratio of x3. This means the power is increased 3 time from the motor to the wheel.
Surely you can work with it and even improve it.
- #385
- 01 Jan 2020

Sumo Competition Robot from LEGO Mindstorms EV3
This is an example of a robot for Sumo Robotics competitions. Specifically for RoboteX challenge. As most of the Sumo competitions have specific requirements for the robot size this one follows the 15cm x 15cm requirements.
Sumo competitions could be quite fun and interesting as the goal is to push the other robot outside of the ring.
- #345
- 26 Sep 2017

EV3 Base Chassis 4 - Back Wheels Reversible Motor
Building instructions for a LEGO Mindstorms Base Chassis with a reversible motor
Note: This robot contains wheels that are from the NXT set.
- #79
- 14 Feb 2016
- 2




Scratch (Word Blocks) program to align to a line with color sensors from LEGO Education SPIKE Prime
This program is developed with LEGO Education SPIKE App Word Blocks and is used to make the Luly, small LEGO Education SPIKE Prime competition robot with 3D building instructions align to a line with two color sensor. It's a mechanism we've used with EV3, NXT and now SPIKE.
- #zc7n23
- 17 Mar 2021

Task - Calibrate more than one sensor with the Advanced Calibration technique
Following the previous tutorials from the course, implement the calibration of the minimum and maximum values.
- #640
- 04 Oct 2017