

EV3 basics course. Color Sensor. Tasks (part 6)
Tasks on using the LEGO EV3 Mindstorms Color sensor. Quite fun and useful for different STEM classes or just to get to know the sensor.
- #152
- 28 Oct 2015
Tasks on using the LEGO EV3 Mindstorms Color sensor. Quite fun and useful for different STEM classes or just to get to know the sensor.
Many teams are having troubles with the EV3 Gyro Sensor and its drift. In this video we are showing one way to fix this behaviour and get an accurate measurement from the sensor.

The EV3 Gyro sensor is quite powerful, but there are some little tricks when using it. In the previous episode we showed a hardware solution to the problem and now we are exploring how could the sensor be calibrated from the EV3-G software. Thanks to Sharon and Faye (full names omitted) for the request for this video.

In the course section for Advance Sensor Calibration we previously showed you how to find the minimum and maximum value for a single LEGO Mindstorms Color Sensor and to store this value in an array. The program was implemented with the EV3-G software. In this tutorial we are going to find the Min and Max for all the four sensors and to store all the 8 values in an array.

Turning with the Gyro Sensor on a specified angle and stopping there have never been easy. It is not going to get any better. However, this is not a problem of the Gyro sensor. The problem is in the way we develop our programs.

We've detected the gap. It's time to move over it. This is difficult because we have to detect where the line is after the 0.1 meters gap on the line following field.

We follow a line. We start from the Smooth Proportional Line Following program and modify it a little for this program. We follow the line with the middle sensor attached on port 2.

Building instructions for LEGO EV3 robot with color wheel that can be rotated through the medium motor. The color wheel is at the front of the robot while there is a color sensor at the back. The color sensor could read the color from another robot. The robot can be used in classes with students to play the telephone game.
An example of a program for controlling the robot could be found at https://www.fllcasts.com/programs/kmeat9-ev3-g-myblock-for-rotating-the-color-wheel-randomly

This device is designed to be attached to "LEGO Mindstorms Robot with a large inertia cargo". It is a color sensor that goes on the caster wheel of the robot. In this case, the sensor will follow the robot.

Umjaho - from the language of the Zulu tribe. It means "competition"
This LEGO Mindstorms EV3 robot has three sensors - touch, color and ultrasonic. When the touch sensor is pressed the robot starts moving. The color sensor is used for following lines and the ultrasonic sensor is used to detect any robots in front of the robot.

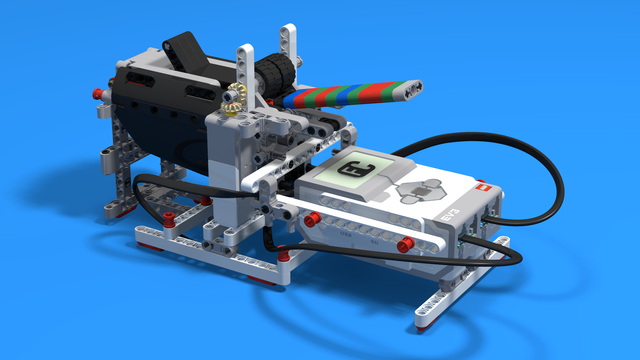
Cody is a robot, designed to move in a straight line. It has a single motor, rotating two wheels. Behind the motor, Cody holds a Color Sensor. These two combined could be programmed to work as a barcode reader, measuring the length of any color beneath the robot.
Geldautomaat, from German, means ATM.
This is the last robot from the 3.0 course book in the LEGO Mindstorms Curriculum. It uses a Touch Sensor to sense if there is a card inside. When touched, a Medium Motor starts spinning and pulls the card inside its chamber, where a Color Sensor reads the data from the card.
NOTE: There is a step, where you have to place the "credit card" inside. It may seem unnecessary and pointless, but otherwise, you will not have proper support for the next steps and the construction will crumble.

This video lesson is a revised version of Episode #1. Matt Gipson requested it in a comment. Using the EV3-G software we have developed a very simple program for following a line with two LEGO MINDSTORMS color/light sensors.

Building instructions for a simple LEGO EV3 robot built using two large motors and a color sensor. The robot is compact which makes it perfect for following a line. Note that the motors are upside down, which will make the robot go backward when we program it to go forward.

The CubeHunter uses the ultrasonic sensor to detect a ball or cube. Next, the robot catches it and reads the colour of the object using the EV3 colour sensor. The building instructions are suitable for classes with students and if you are working alone at home.