This is the final run for our World Robotics Olympiad (WRO) 2015 Elementary Challenge Robot. In "dives", detects the color of the pearl and then counts the number of Ping-Pong balls to release.
- #191
- 19 Dec 2015
- 4:51
- LEGO MINDSTORMS, LEGO MINDSTORMS EV3
- World Robot Olympiad 2015 Robot Explorers, World Robot Olympiad, EV3, WRO 2015, Gyro Sensor, Sensors, WRO, Construction
This WRO elementary challenge is great for working with students in the field of STEM. It has everything one could search for at this age of the students. The task involves working with a sensor and manipulating and object. It has a goal. And the whole program should be repeated three times. Which means that the robot should be stable.
All the episodes from the series are available at:
World Robotics Olympiad 2015 Elementary
Here is how the robot looks at the end:
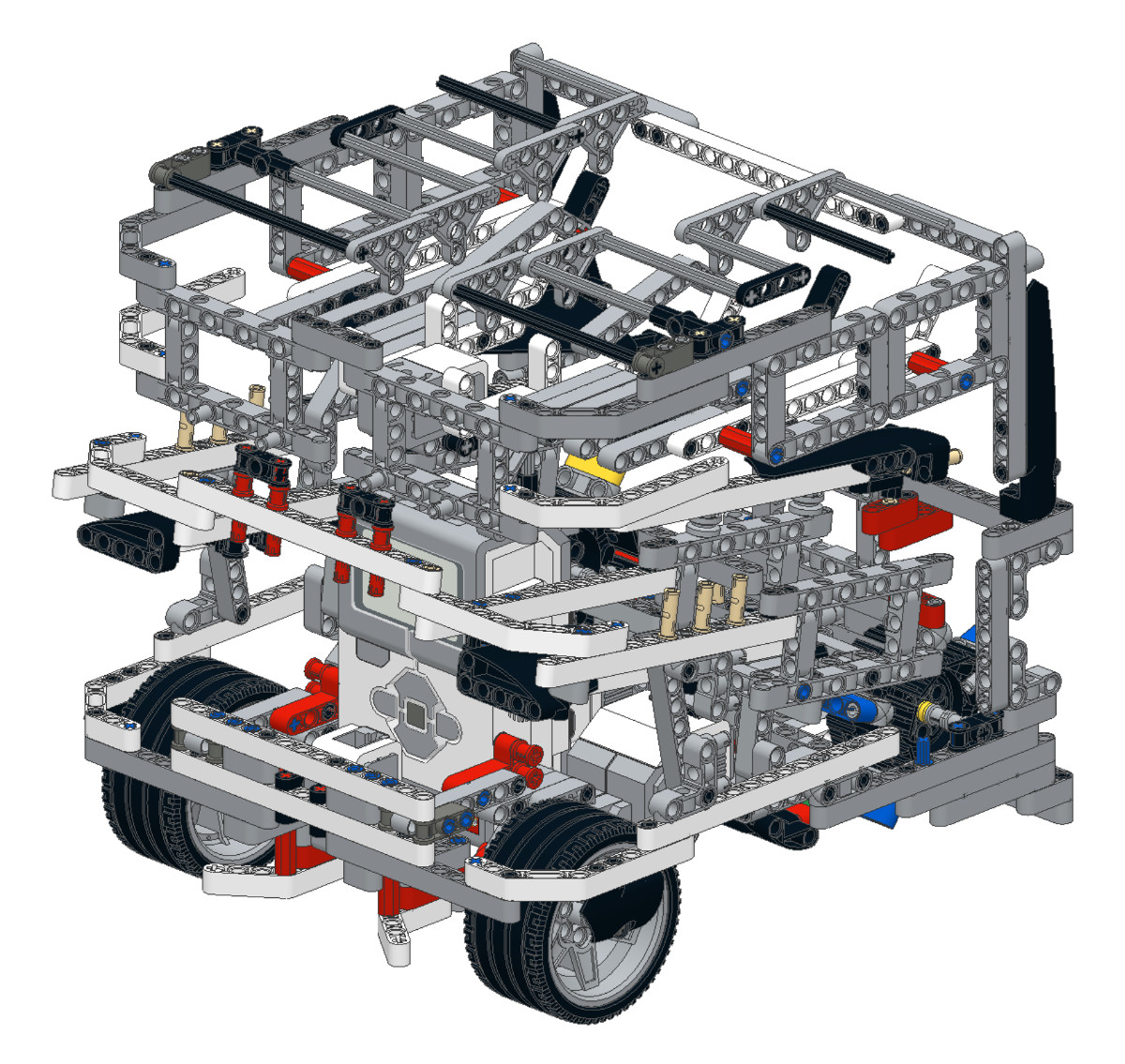
WRO Better robot 2
A chassis built with LEGO Mindstorms EV3 parts designed for World Robotics Olympiad

![]()
WRO Robot with Attachment 1
The first of a series of attachments that we add to a World Robotics Olympiad LEGO Mindstorms Robot. The attachment is an example for collecting ping-balls. The robot and the attachment are in the same construction. The attachment is a base for a container that could be extended.

![]()
WRO Robot with a Ping Pong Balls Collecting Attachment - Full
This WRO robot is designed to collect a lot of ping pong balls in its container. It's built with LEGO Mindstorms EV3 45544 and 45560 sets. These are the LEGO Educational sets. The robot has two chains that collect the balls and push them into the container attachment. This is one of the larges robots we've uploaded at FLLCasts yet. You could learn a lot by following the building instructions and paying attention to the details of how this robot is built. All the alignment, all the connections. Really beautiful.

![]()
WRO 2015 Elementary Robot Program

![]()
Block for accurate turning on 90 degrees with the Gyro Sensor
This block accurately turns the robot to a specific angle. One of the most useful blocks that you could use during competitions. The block makes the robot turn and when the robot makes an error, the block will correct for this error.
Finally, you can be sure that the robot has turned to the specific angle that you want.
You have three inputs
- Turning angle - the angle that you would like the robot to turn.
- Power - the power that you would like the motors to have
- Correction power - the power during the correction phase.
VERY IMPORTANT: This is a block for EV3-G. You download and import this block from Project Settings->Blocks->Import. If you are using Internet Explorer or Microsoft Edge and you click to download the file it will try to save it as "zip". DO NOT SAVE IT AS ZIP. Save it as "ev3s" or just PLEASE, STOP using Internet Explorer or Microsoft Edge. This will dramatically improve your browsing experience.
![]()
English
In the previous videos we did a small introduction on the World Robotics Olympiad (WRO) 2015. This is the field. We've build a number of robots and that's our probably final version of the robot. In today's video we're going to solve part of the competition mission.
First, the rules of the competitio,we have the robot and this robot dives. When it dives it collects different pearls and they are in different colors. They can be placed in different ways on this part of the field. Now when the robot dives, it must detect the colors of these blocks, these are the pearls and depending on this color it releases a number of ping pong balls in this red region and that's the mission and we must repeat this for the red region, for the yellow and there is a green region, right over there on the field. Generally at the competition you start with the green but, because we don't want to solve the whole competition we start in reverse with the red, so that we can show the principle. Let's see a complete run now of this robot and how it works. This here is the robot, it has a gyro sensor, a color sensor and all the balls are loaded. Now I'll start it and see how the mission is completed. Waiting.
The robot comes and aligns with the gyro sensor, so it is facing east then it comes and dives for the second pearl,
detect the color of the pearl, it is red it aligns again, it is facing east, move, now is facing north, comes detects blue, then returns and it must release a different number of balls depending on the color.
So that's how we complete this mission. Let's go into more details how the robot works. A step by step execution of this mission along with a few explanations will look like this. Starting the program. I'll place the first pearl, right here. Program is downloaded, The robot moves, takes the first pearl and we here wait, we now face west but we move back, then we go for the second dive, we wait and now we dive and we take the second pearl, because we are facing north with the gyro sensor and we have a special block that's called align and it will face the robot in different directions using only the gyro sensor.
It will now go for the third pearl, return and now continue back to base and we release some of the balls.
What is interesting for this program is that we face
east or west only using the gyro sensor, so we have a special block that's called accurate turning. This block can accurately turn the robot to 90 degrees to face a certain direction, whether it is west or east or north or south because this here is the north. That's one of the special blocks, the other blocks are quite easy and they are not even following the lines, they are just detecting the lines and detecting the colors of the different pearls. Of course, this whole program is repeatable for the yellow and green and it must be completed in about 30 seconds and we complete it in about 28 seconds. So this is for the World Robotics Olympiad (WRO) 2015 Elementary challenge. Detect color of the pearls, release different balls and face different directions using only the gyro sensor. You can find the instructions for building this robot along with the program for it in the materials below the video. Chck them out, try to implement them and I hope they'll be usefull for you.
Courses and lessons with this Tutorial
This Tutorial is used in the following courses and lessons

World Robotics Olympiad (WRO) 2015 Elementary. Review of solutions with explanations
You must dive. You must count. You must release. Well, not exactly you, but the robot. In this playlist we present an example solution to the WRO 2015 challenge along with some nice constructions for releasing balls while counting them with a robot. That sounds pretty easy, but could get quite challenging when the number of balls is large.
- 5
- 23:43
- 0
Field Run. Part 1
This is the final run for our World Robotics Olympiad (WRO) 2015 Elementary Challenge Robot. In "dives", detects the color of the pearl and then counts the number of Ping-Pong balls to release.
- 1
- 0
- 0
- 3d_rotation 3