

Programming a menu. Storing in Arrays. WRO Elementary 2013.
The challenge for this video is to program a menu that is controlled from the LEGO Mindstorms EV3 brick screen.
- #220
- 17 Jul 2016
The challenge for this video is to program a menu that is controlled from the LEGO Mindstorms EV3 brick screen.

In the video we improve on the robotics mechanism for pushing the different blocks out of the robot container. We continue from the previous video.

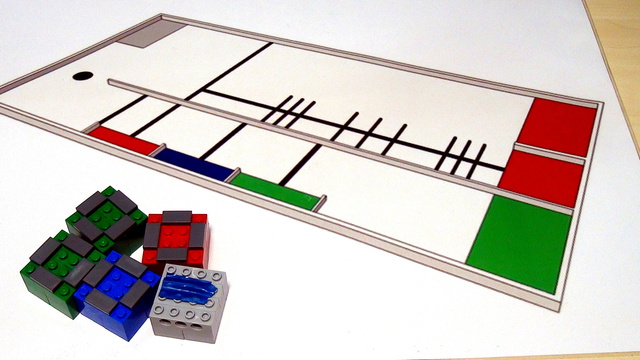
In this video we look at the robotics mechanism for dropping the different blocks into the different region on the World Robotics Olympiad 2013 field.
We are working on the World Robotics Olympiad (WRO) 2013 competition and its elementary part. The series will introduce three different concepts and this would be Arrays, Menus and Counting different lines. In the video you will see the robot working as it is in the final stage.

One of the interesting things in this sequence of videos is the program. The program detects when the system has reached the maximum speed and then stops the motor from rotating. We detect this with the EV3-G software

In the video we reach a conclusion. We have energy accumulated and to keep the system turning we need about 1J of energy each second to keep it turning.

Many teams have followed the same idea as the ELM team. To build a LEGO Mindstorms attachment for the robot and to lift the truck very lightly. In this way they could more the truck and place it in the special region. See what the ELM idea was.

Go to the missions model. Do the missions. You can then continue to the next mission or wait a few seconds at this FIRST LEGO League 2015 Trash Trek mission model and receive a few more points. Isn't it interesting. The ELM team has build a LEGO Mindstorms attachment for this robot. Let's see how it works.

There are many loops in the FIRST LEGO League competition. In this video we collect some of them by following the idea of the ELM team.

You can collect the car for scrap or repair it. The ELM teams decide to repair it. This requires them to place the engine in the car and it's very interesting to think about this problem.

This is a very interesting idea that is worth sharing with the rest of the teams and the ELM team has provided it to us. Check out how they drop a LEGO human at a specific place.

You need to pull. And also catch. You need a carabiner. We have done a number of videos on carabiners and this is one of the ideas for the FIRST LEGO League 2015 Trash Trek competition.

Many FLL competitions have a mission for demolition. You should always destroy something, but destroy it in a regulated manner and probably collect the destroyed mission model after that.

We would continue from the previous program where we used variables and we would change this to arrays.

This is one of the very interesting attachments by the ELM team. It is using rubber bands and some rubber to precisely drop the chicken. Very interesting way. Check it out and try to learn from it.

The robot works on the field and decodes the different colours that represent the rows and the columns.

In this video we discuss part of the pinless attachments build by the ELM team. Without pinless attachment it is nearly impossible to achieve a good score at the FIRST LEGO League competition.

We would look at the rules of the competition over our small model and we would start solving the field.

In this series we will do a short demonstration on the FIRST LEGO League Trash Trek 2015 solutions by one of the teams. These are example solutions with good tips and tricks along with some interesting strategies and videos directly from the team

We would see how both satellites work together on the World Robotics Olympiad competition. They must both follow different orbits and must cooperate for the mission to be accomplished.
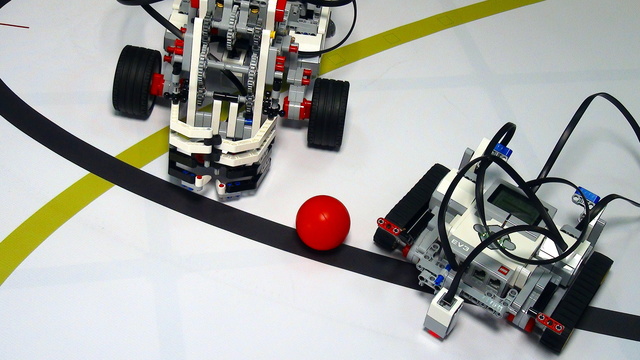
Starting with the World Robotics Olympiad 2014 Junior-High challenge we first catch the object on our path. We discuss a good mechanism for catching and lifting balls that can do two movements with one motor.

We discuss the state of "Lost" and the different ways we could escape this state. We also build the next step of our State machine programming pattern where the next state is determined by the previous state.

Moving in a grid of objects. That's the large challenge of the World Robotics Olympiad 2015 Junior-High 2015. In this video we would build a robot that can collect the boxes (treasures). The robot would also be able to move around the treasures.

The field in the game of life could be finite or infinite. It is interesting to see and learn how an infinite field behaves and works.

Display a matrix on the brick screen. Simple and easy. Download and run the program to see how

