
EV3 basics course. Ultrasonic Sensor. Move after object is removed (part2)
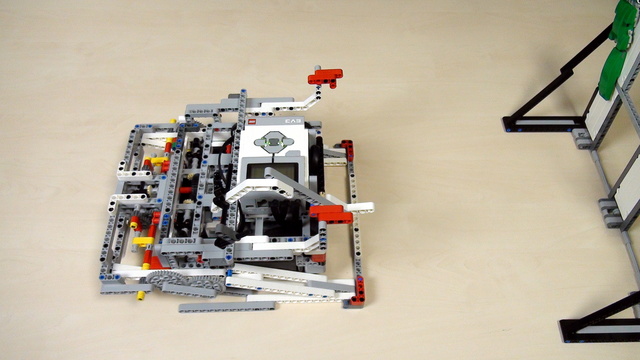
The robot detects an object. After the object is remove we want to make the LEGO robot move forward.
- #143
- 13 Oct 2015
The robot detects an object. After the object is remove we want to make the LEGO robot move forward.

Complete introduction to the LEGO Mindstorms EV3 Touch sensors from the very first step. In this video tutorial we program the robot to stop on touch sensor pressed. Again, this is based on your feedback that much of our tutorials in previous years were a little more advanced and that we have never made a proper introduction. A few more videos on touch sensor will follow after this

We just had some enormous amount of fun with building and using a catapult/trebuchet. Yes they are quite different, but the result achieved in the lesson is something in the middle. Learn how to fire elements using the LEGO Mindstorms EV3 or NXT robotics set. Challange yourself, your team or your students to build it and fire elements as far and as accurate as possible.

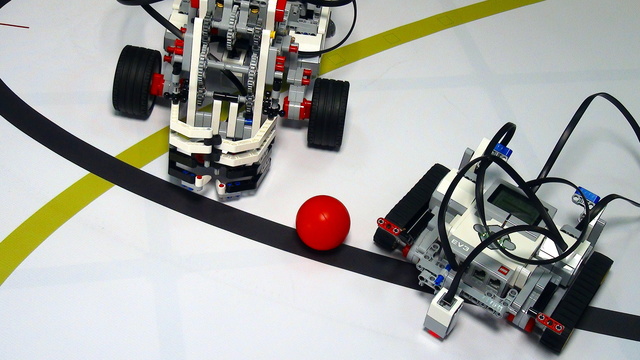
Football with robots could be quite fun. Football with LEGO Mindstorms robots is one of the popular categories for competitions with LEGO Mindstorms Robots.
The FIRST LEGO League competition is similar each year. With a little experience you could accomplish most of mission. The goal of this episode is to introduce you to the course, its purpose and approach.

Here is Iknathir - a LEGO Paper Plane Launcher. Just take a piece of paper, fold it to create a paper plane, place it on top of Iknathir, press the lever forward and the plane will be launched in the air. If you are not sure how to make a paper place, we got you covered! Just go to the following tutorial - How to make a simple paper plane. Feel free to experiment with the structure of the plane. How far can your plane go?

This tutorial is about how to follow a wall with an ultrasonic sensor. The example is with a border from a FIRST LEGO League (FLL) competition, but could also easily be applied to other competitions and problems.

We create a program for detecting when the Touch Sensor was Pressed/Released. Move until it is pressed, continue when it is released.

The way sensors and programs work in a robotics system is sometimes not-intuitive for a beginner, but nevertheless very logical. Building a program for a touch sensors for "Press->Go->Press->Stop" using the EV3-G software could be quite challenging at the beginning even for experienced teachers, students and robot builders.

This is a fun video with robots doing the Harlem Shake. We thought about posting the programs for the robots, but actually the whole Harlem Shake is so awkward that we decided not to do it :) Enjoy the video

One attachment to rule them all...We have seen it and it works -> solving most of the competition models with only one attachment. In this video tutorial without programming we would walk you through the principles and methods of using a single attachment for most of the FIRST LEGO League competition models. One can learn alot from using as few parts as possible to solve as many missions as possible.

Mantissa, a LEGO Mindstorms Robot, moves and attacks. It uses the ultrasonic sensor and it's two special hands. Follow the building instructions and download the prepared program to directly use the robot.

Specific challenge on programming the robot to move as a Yo-Yo

Experiment with moving the robot in different geometrical figures. The tasks could be used in STEM classes for introducing students to geometry and math.

Move the robot using the Move Steering block. We explore what the different values for Steering mean and how to use them. We also explore how the motor is configured to run for a number of rotations or seconds and what is the difference.

We challenge you to build a construction of cardan joints that transfers power to a maximum angle. Submit your solutions to [email protected] and win an award. Use the challenge in home or in the classroom. Initial Deadline is 18 of Aprill 2015.

Build a rack and try to lift the robot with this rack.
We are working on the World Robotics Olympiad (WRO) 2013 competition and its elementary part. The series will introduce three different concepts and this would be Arrays, Menus and Counting different lines. In the video you will see the robot working as it is in the final stage.

A robot that contains balls and releases them. It counts how many balls to release depending on the "treasures" it has hunted on the field. This is part of the World Robotics Olympiad 2015 Elementary challenge.

We have previously aligned to lines with the Color Sensors. In this series we are doing the same program, but with Ultrasonic Sensors that are aligning the robot to a Wall.

Part four of the Catapult series is again about loading the catapult automatically but this time using EV3 brick, motor and sensor. We use a gear system with a medium complexity along with a "standard clutch" available in the LEGO Mindstorms EV3 kits. As a result, at the end of the video, the Catapult loads and fires automatically.

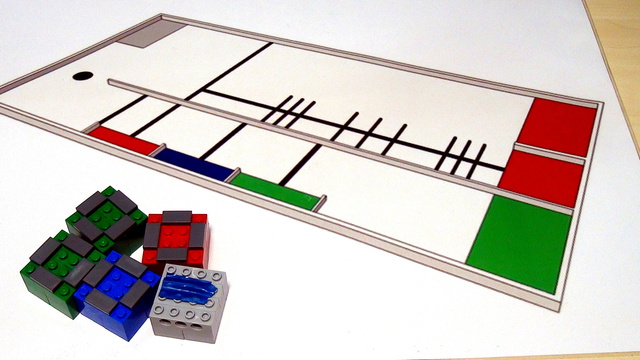
Moving in a grid of objects. That's the large challenge of the World Robotics Olympiad 2015 Junior-High 2015. In this video we would build a robot that can collect the boxes (treasures). The robot would also be able to move around the treasures.

How can you accumulate some energy in an LEGO Mindstorms EV3 construction an use this energy at a later moment? How does a Flywheel work, why is it important and what is the purpose? What is energy, inertial moment and angular velocity. These are just some of the questions we would answer in this series on Physics and LEGO Mindstorms.
Starting with the World Robotics Olympiad 2014 Junior-High challenge we first catch the object on our path. We discuss a good mechanism for catching and lifting balls that can do two movements with one motor.

In this second video lesson on catapults we improve the stability of the base of the robot. An important feature of the new base is that it is not bending. Use the same principle in all of your constructions to achieve better, stronger robots.

Robotics competition is a large part of the FLL Competition. The field contains missions which give points and the main purpose is to gather maximum number of points for 2:30min. FIRST LEGO League competitions have different themes every year but the tasks have similar functionality. In this video tutorial we will give a brief of missions in Senior Solutions (the theme for 2012).

This tutorial demonstrates how a robot could align to a black line. The code for the program is available in the course. Aligning to black lines is popular at robotics competitions like FIRST LEGO League as it is the primary way to know where you are on the field and to develop a program that is reproducible. The attachment uses Luly, a small LEGO Education SPIKE Prime competition robot with 3D building instructions as a robot base.