
Contain and release ping pong balls. WRO Elementary 2015. Part 2
Improving the construction for the World Robotics Olympiad missions. The improvement is in the position of the sensor and the size of the balls container.
- #137
- 12 Dec 2015
Improving the construction for the World Robotics Olympiad missions. The improvement is in the position of the sensor and the size of the balls container.

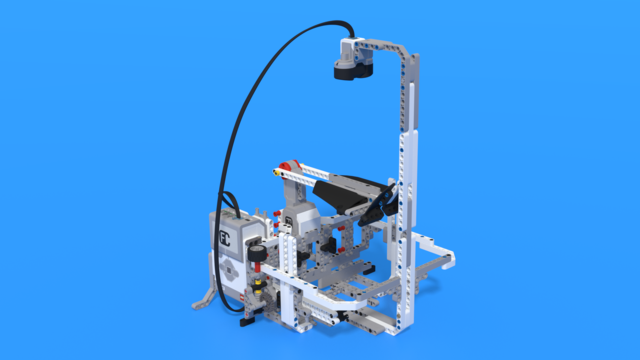
Next robot construction for holding and releasing balls from this container. In this video we discuss the improvements and how to use the chains to release one ball at a time.

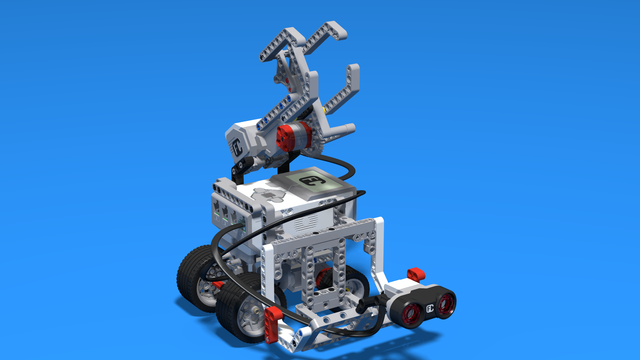
LEGO Mindstorms Robot Base for a high placed attachment for containing ping pong balls. It is interesting how the balance is achieved with such an attachment. It was only one of the version in a series of LEGO Mindstorms Robots for World Robotics Olympiad.

Robot building instructions for a World robotics Olympiad with a large container used for collecting ping-pong balls

Robot for collecting ping pong balls used in the World Robotics Olympiad competitions. It is constructed with LEGO Mindstorms EV3

Building instructions for the LEGO Mindstorms EV3 robot used for accomplishing WRO 2014 mission. It is the full robot with the lift at the top

This is a ping-ball containing attachment for a World Robotics Olympiad. The attachment is building with LEGO Mindstorms EV3 parts. It is tiltel so that it is easier for the balls to fall off at certain points, which was part of the missions at the 2015 cmpetition.

A robot that contains balls and releases them. It counts how many balls to release depending on the "treasures" it has hunted on the field. This is part of the World Robotics Olympiad 2015 Elementary challenge.

This is one of the robots used in World Robotics Olympiad. It uses chains to move ping pong balls out of a container.
Mintonet (engl. Mintonette) comes from the name of the first iteration of volleyball.
The robot can move only forward and backward, without turning, with the help of a large EV3 motor. Another large motor is used to shoot. The robot uses an EV3 ultrasonic sensor to detect its partner and throw a ball at it.

Mintonette comes from the first iteration of Volleyball with the same name.
The robot uses two EV3 Touch sensors to control the turret left and right. It uses the EV3 Color sensor to trigger the shooting mechanism, which consists of an EV3 Large motor which pulls a lever to shoot a ball.
The Laboratory is a robot that tests your programming skills. You will have to measure the volume of a balloon, only by the values you receive from the sensors.
It has a valve, that allows you to deflate your balloon at different rates.
How to place the balloon in the robot is explained in this tutorial.

The programs are designed to be used with Mintonet - a LEGO Volleyball robot.The project consists of several programs:

Go, robot, grab the ball!
If you want to have some fun and play some ball grabbing with your Mindstorms Robot Inventor 51515 set, these are the building instructions you'll need. As you probably know, Tricky is the smallest robot made from this set. With this ball grabbing attachment, you could program Tricky to grab the Mindstorms/Duplo ball, which is included in the set, and place it wherever you want.
You can find the LEGO set, with which this was built, by following this link.
You can find other attachments for Tricky, by following the links below:
You can find constructions created to play with Tricky, by following the links below:

Do you like playing bowling? How about playing it with a Mindstorms 51515 Robot Inventor set? Well, these are the building instructions for the bowling pins and "playground". In order to play bowling with a robot, you'll first have to build one. This particular construction was created to be used with Tricky - the smallest Inventor robot - and its Kick the ball attachment. You could later spice things up and try to play it with the Turning attachment for Tricky.
You can find the LEGO set, with which this was built, by following this link.
You can find constructions created to play with Tricky, by following the links below:

