
Camel built from LEGO EV3 Mindstorms
This is a Camel-like robot. We demonstrate an interesting use of gears to make the Camel walk. Fun and entertaining way to learn how to transform motion.
- #416
- 01 Aug 2017
This is a Camel-like robot. We demonstrate an interesting use of gears to make the Camel walk. Fun and entertaining way to learn how to transform motion.

Yolanda comes from the novel "Yolanda, the Black Corsair's Daughter" by Emilio Salgari.
The robot resembles a sailship with two masts. The mast in the back is connected to a medium motor, which allows it to rotate with some limits. The mast also has a gyro sensor in the back. These are placed so that the gyro sensor detects which way "the wind is blowing" and moves the sails that way. The second mast is connected to the first one so that it moves accordingly. The robot also uses two large motors to move.

A LEGO door with a touch sensor that knows when it's open. It has a stopper and even makes the familiar noise of a creaky door. You can use it by its own or put it in a model of a house.

These are building instructions for an attachment accomplishing the FIRST LEGO League 2017-2018 Slingshot mission. The based of the robot is LEGO Box Robot Three With Large Wheels and Thee light sensors and one Gyro

Building instructions for a LEGO Mindstorms EV3 active attachment for changing gears orientations. This is the third attachment from the series.

Susan comes from Sue, which is the name of the largest fully preserved specimen of T-Rexes.
Mark comes from Marc Bolan, who is the lead singer/gutarist of the band T-Rex.
The robot is made to resemble a T-Rex (Susan) chasing a car (Mark).
The T-Rex uses a Large motor to go forward and backward. The other Large motor is used for the car, which resembles a very simple 4-wheel vechicle. Susan's task is to spot Mark using the current power option of the motor rotation sensor. As T-Rexes can not notice you if you are moving very slow, Mark is trying his best to move really slow so that he doesn't get spotted!

A phone holder that rings an alarm when the phone is picked up. It is a plate, lying on a rubber wheel, that changes its height, based on the weight of the object placed on top. The color sensor detects these changes and rings the alarm. With some fine tuning, this robot can even act as a weighing machine.

For the FIRST LEGO League 2016-2017 Animal Allies we prepared an attachment for lifting the robot. The idea of the attachment is to show how you could lift the whole robot with a system of gear wheels, levers, and scissors constructions.
Built mainly from LEGO Mindstorms EV3 parts but could probably be constructed from NXT sets.

Building instructions for this LEGO Mindstorms EV3 robot used in the World Robotics Olympiad Junior competition

Accomplish three FIRST LEGO League missions at once. This is an interesting Large multi-purpose FLL attachment for a box robot that could be used to accomplish a number of missions with a single exit of the field base.

The third version of the EV3 Easy Bot. This is a simple and easy to follow robot, that aims at showing the use of tyres on robots. The robot has a gear up ratio and no tyres, so it is quite fast and entertaining.

This is a simple LEGO Gear System with a ration of 1:5. When the large wheel rotates 1 time the small wheel will rotate 5 times.
Can you find out why the robot is called "Omusbot"?
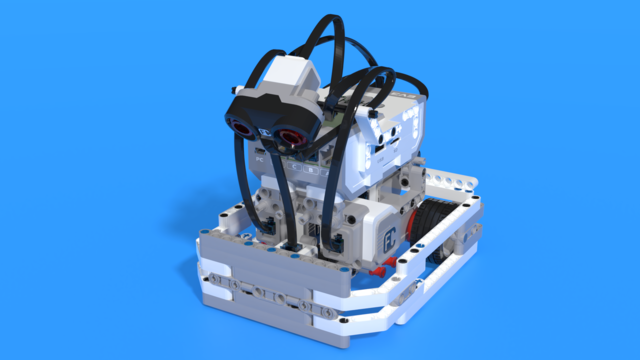
The robot is made as a nice base for more advanced LEGO Sumo competition. It uses two motors, which are put on backwards for more traction. On the front, it has a color sensor, which detects the border line of the field. Over them, there is an ultrasonic sensor, that detects the enemy robot. Finally, on the back, the robot has a touch sensor to detect if it is being pushed.

This is the third version of the LEGO Mindstorms Grabber. This time we use a LEGO EV3 Medium motor and worm gear to make the two levers move smoothly and symmetrically.

This attachment is meant to be built on the robot Francesco 2. When the red connector for the transmission connects the two axles for the rear gear wheels, the differential locks and the motor starts evenly transferring its power to both wheels.
When the red connector for the transmission is pushed to the side, the differential unlocks and once again transfers its power to the wheel with least resistance.
You can see empty beams hovering over this attachment. They are there so you can attach a lever construction over it, to help with the locking and unlocking of the differential. Similar leaver can be seen in the robot Catapult.

LEGO Mindstorms EV3 Robot designed for a Folk Race competition. This robot has three Ultrasonic Sensors. Follow the building instructions and at the end, you would have a very basic robot with tank treads that you could directly use.

These are building instruction for a working automatic catapult with a motor and a touch sensor.

This module is meant to be used in EV3 Kinesthetic and Memory Game and is attached to the base of the robot. This is the simplest module for constructing and programming. At the bottom, a channel is left for the cable to pass through.

This attachment accomplishes the Into Orbit Space Walk Emergency mission from the FIRST LEGO League Into Orbit 2017-2018 competitions. The base robot is the SUV Competition Box Robot from LEGO Mindstorms EV3.
The program for this attachment is at Programs/w415dz-fll-2018-attachment-to-accomplish-the-into-orbit-space-walk-emergency-07-robot-game-missions-program.
Soon we would publish and a video of how the attachment works.

This is a LEGO Mindstorms Boxing robot. The inspiration story goes like this "One day we though - Let's play SUMO at this robotics demonstration, but let's make it more interesting. Let's play sumo with Humanoid Robots". We decided to build a boxing robot. The goal of the robot is to press the touch sensor on the other robot and it could be very fun. Perfect robot for demonstration. It is controlled by a joystick using the Bluetooth connection.
Here are the joystick and the programs for the joystick and the robots.